| 中国科技大学《计算机图形学》2018年春夏学期课程项目展示 |
|
项目1: Raspberry Car 肖映泰 (PB15000105)1 于 朔 (PB15000161)1 1少年班学院2015级 指导老师:刘利刚 |
|
|
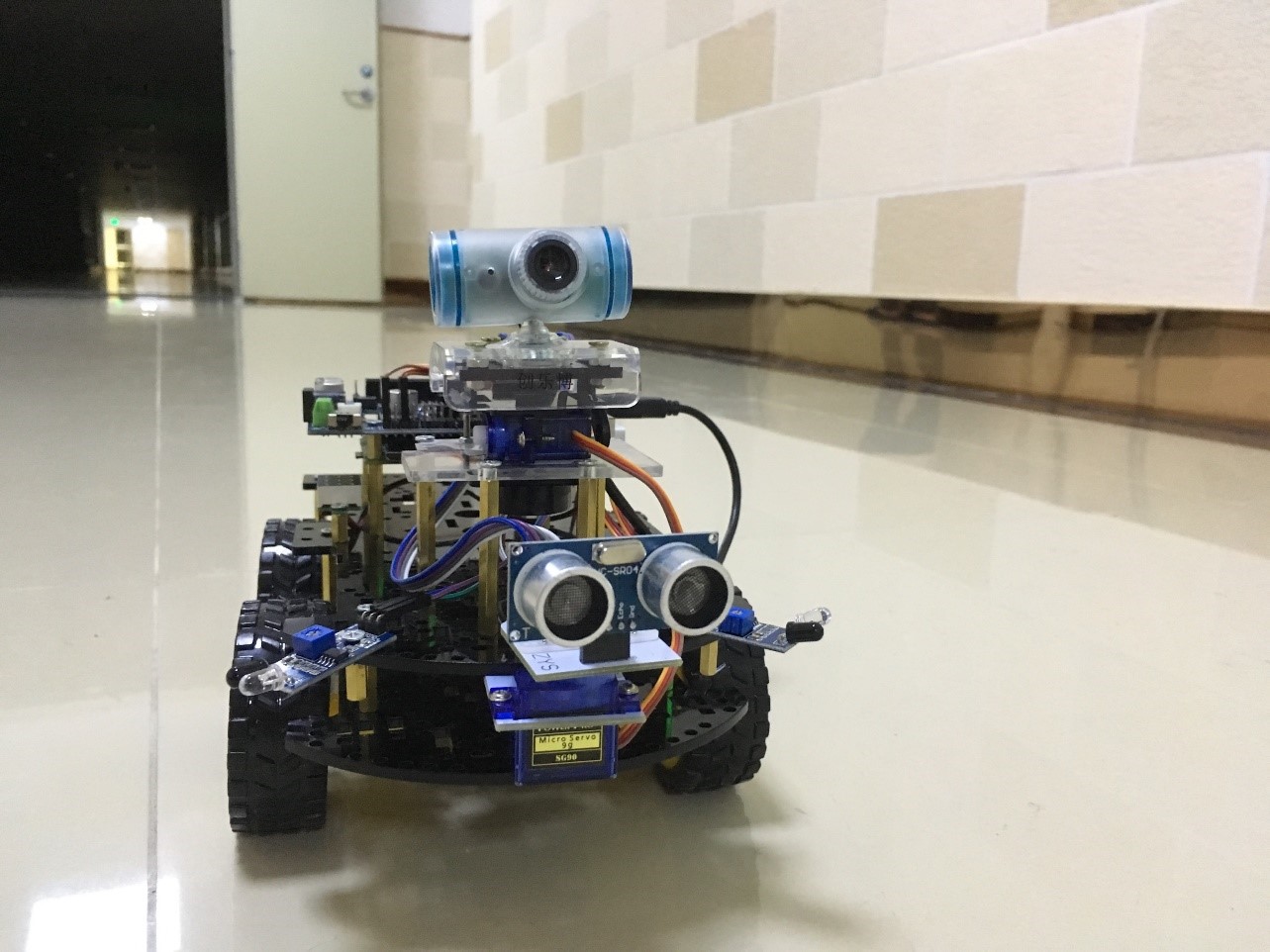
图 1: 小车实物图
|
|
项目简介: 利用树莓派搭建自动避障小车,并实现目标跟踪。利用红外探头和声波测距对周围的障碍物进行检测,构建算法躲避障碍物并找到通行的道路。利用opencv颜色检测追踪具有明显颜色特征的乒乓球,根据视频中乒乓球的位置移动小车实现追踪。
|
|
项目视频: |
|
|
|
下载专区: |
|
项目分工:
|
|
总结:
|
|
致谢:
|
|
返回项目主页 |
| Copyright © 2018 GCL , USTC |