| 中国科技大学《计算机图形学》2016年春夏学期课程项目展示 |
|
项目10: 扫地机器人 顾欣玮 (PB14001049)1 葛子恒 (PB14001048)1 冯睿蠡 (PB14001007)1 1数学科学学院2014级 指导老师:刘利刚 |
|
|
图 1: 扫地机器人
|
|
项目简介: 我们通过超声波探测器,红外遥控接收装置和两个电机实现在不预先知道区域形状条件下的遍历多连通区域。考虑到现实的可操作性,我们设计了共计2种算法来实现这一功能。
|
|
电路图: 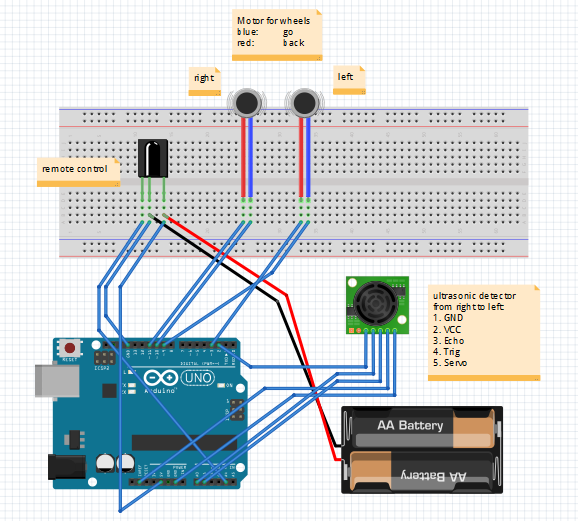
|
|
项目视频: |
|
|
|
下载专区: |
|
项目分工:
|
|
感想与不足: 由于时间和经验的不足,以下诸方面没有制作完善:
|
|
致谢: 感谢中国科学技术大学创客实验室为本项目提供了大量支持 |
|
返回项目主页 |
| Copyright © 2016 GCL , USTC |