| 中国科技大学《计算机图形学》2016年春夏学期课程项目展示 |
|
项目3: 激光引导自动炮瞄系统 徐崇润(PB13000666)1 孙元(PB13001032)2 陈潇涵(PB13000689)1 1少年班学院2013级 2数学科学学院2013级 指导老师:刘利刚 |
|
|
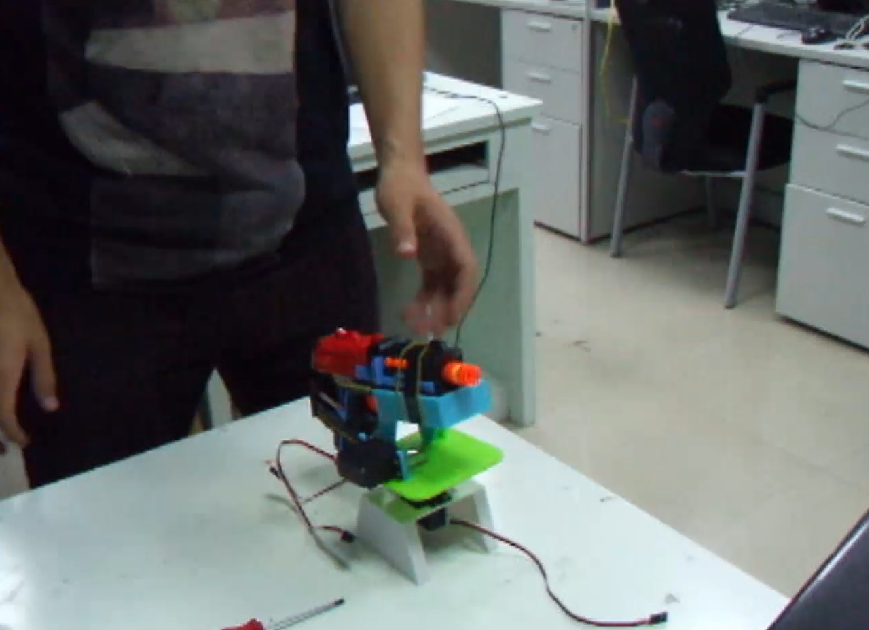
图 1: 激光引导自动炮瞄系统
|
|
项目简介: 本次作业我们通过灰度梯度加上圆度检测的方法来摄像机视野中的圆形激光光斑,并实现双目摄像机的三维坐标测量算法获得激光光斑的三维坐标。我们使用玩具手枪、舵机、云台搭建了具有两个自由度的炮台装置。在得到激光光斑的坐标后,我们根据子弹的运动方程求解出炮台所需的水平偏转角和仰角,再通过Arduino单片机驱动舵机旋转到指定角度。最终通过第三个舵机的旋转带动与扳机相连的细线扣动扳机进行发射。炮台操作中,我们只需要帮主炮台进行上膛动作,使用激光笔指定炮台位置和目标位置,剩下的工作全部由炮台自动完成,即激光引导自动炮瞄系统。
|
|
项目视频: |
|
|
|
下载专区: |
|
项目分工:
|
|
感想与不足: 三周的时间,我们较为出色地完成了我们开始预期的成果。虽然在项目进展中,我们也曾开玩笑道:“每一次project都是一次不断妥协的过程。”没错,我们从一开始想做的能自动行驶、带避障功能的移动炮台,到固定的全自动化炮台,再到现在的需要手动上膛的炮台,我们确实一直在妥协。但我们仍然实现了我们想实现的最主要功能,我们仍为我们的作品感到骄傲。We’re makers! 但仍需承认,我们的作品有太多的不足:
|
|
致谢:
|
|
返回项目主页 |
| Copyright © 2016 GCL , USTC |