| 中国科技大学《计算机图形学》2016年春夏学期课程项目展示 |
|
项目5: 二轮自平衡小车 施泽丰 (PB14210224)1 焦孟娇 (PB13000818)2 欧阳文清(PB13001120)3 1信息科学技术学院2014级 2少年班学院2013级应用数学方向 3数学科学学院2013级计算数学方向 指导老师:刘利刚 |
|
|

图 1: 二轮自平衡小车
|
|
项目简介:
自制二轮自平衡小车,只有左右两个轮子,而我们的目的便是让小车自行控制两个轮子的转速,达到自我平衡的目的。同时,它还可以接收蓝牙指令:开启、结束、前进、后退,并作出相应动作。 主要原理是:通过实时检测小车的倾斜角及其角速度、小车两个轮子的速度,利用PID算法对电机输出做出适当的调整,使小车时刻保持在比较平衡的状态。
|
|
电路图: 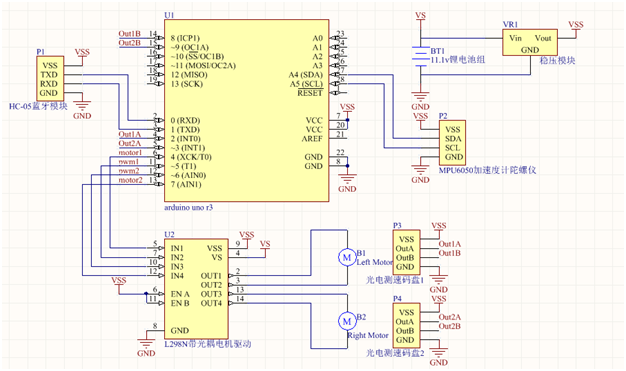
|
|
项目视频: |
|
|
|
下载专区: |
|
项目分工:
|
|
感想: 虽然这是一个开源项目,在网上能找到很多相关资料,但由于我们经验不足,仍然犯了许多错误。事实上,由于我们设计的小车比较大,而且重心高度不合适,一开始调整程序参数时完全没法做到平衡,后来在提高一定高度重心,将MPU6050(用于获取角度与角速度信息)降低高度后,终于开始有所起色。而在测定轮子行走距离时,也遇到了由于中断函数太长而把所有计算资源都用于统计轮子行走距离的问题,当然了解这个原因后只要把中断函数改短即可,但在了解这个原因之前,浪费了很多时间,做了很多无用功。 在课程展示之前,我们的小车已经达到了基本功能,但是可能由于地面因素、电池电量等问题,在课程展示时并没有展示出最好的效果。在实验报告提交前,我们又对小车做了进一步的调整,并录下了视频。 对于以后的完善,我们希望对于小车的转向做出控制,即当小车平衡时,不会出现往左转或往右转的情形,只有当我们发出指令时它才会转。
|
|
致谢: 感谢刘利刚老师对我们项目的肯定,以及感谢互联网上众多网友提供的参考资料。 |
|
返回项目主页 |
| Copyright © 2016 GCL , USTC |