| 中国科技大学《计算机图形学》2017年春夏学期课程项目展示 |
|
项目2: 魔方机器人 周肖宇(PB13001082)1 陈臻(PB14001085)1 张占秋(PB14001026)1 1数学科学院2014级 指导老师:刘利刚 |
|
|
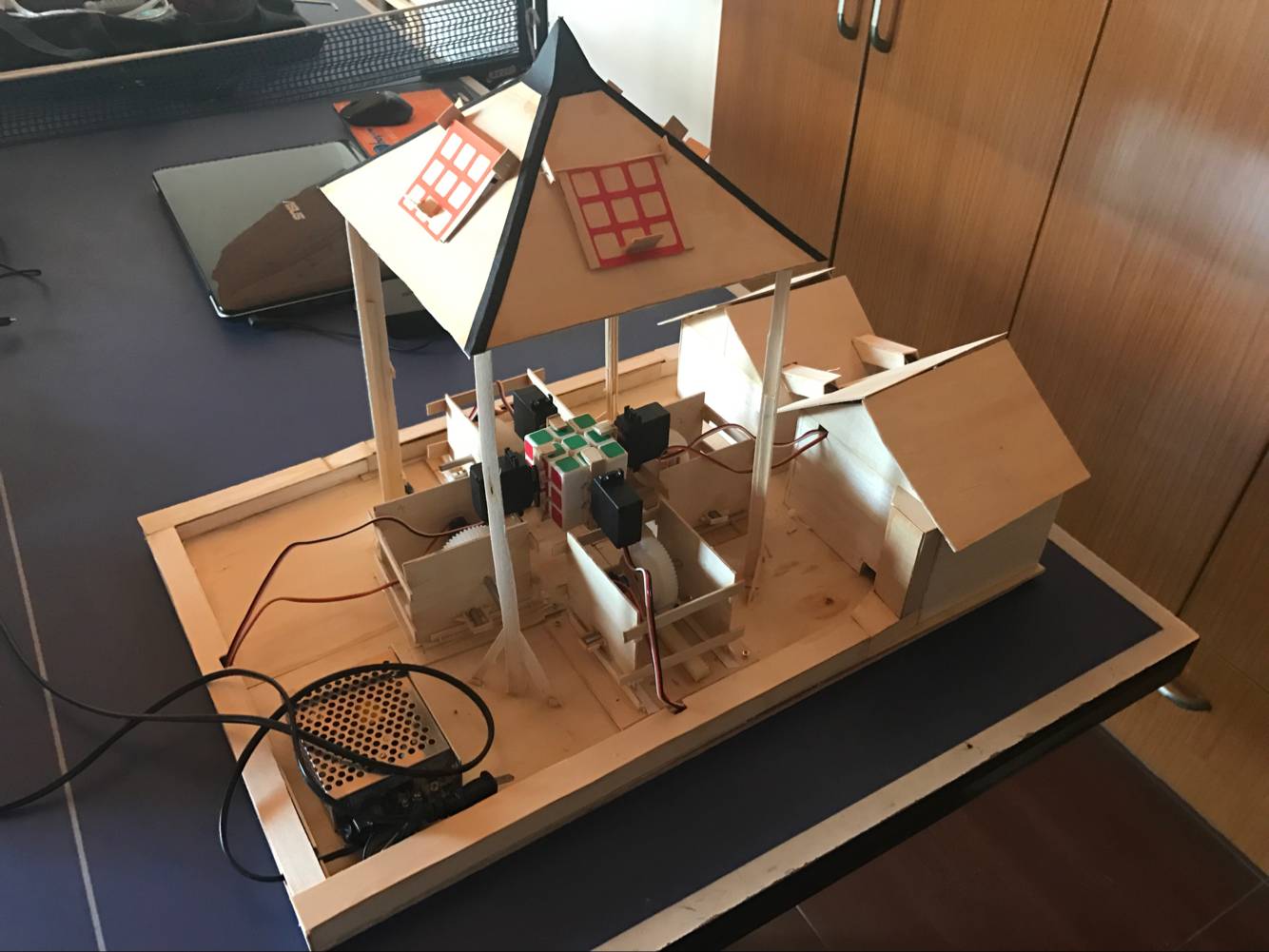
图 1: 魔方机器人实物图
|
|
项目简介: 魔方,这一在青少年中风靡的智力玩具,如何快速还原魔方,吸引着无数青少年为之着迷。本 小组尝试使用arduino 板、四只机械臂、摄像头组成的机器人,实现自动识别魔方状态、还原魔方。 具体过程如下:通过WiFi 模块拍照识别魔方每个面的状态,通过降群法得到还原步骤,最后通过 arduino 板控制机械臂完成特定指令的转动。
|
|
电路图: 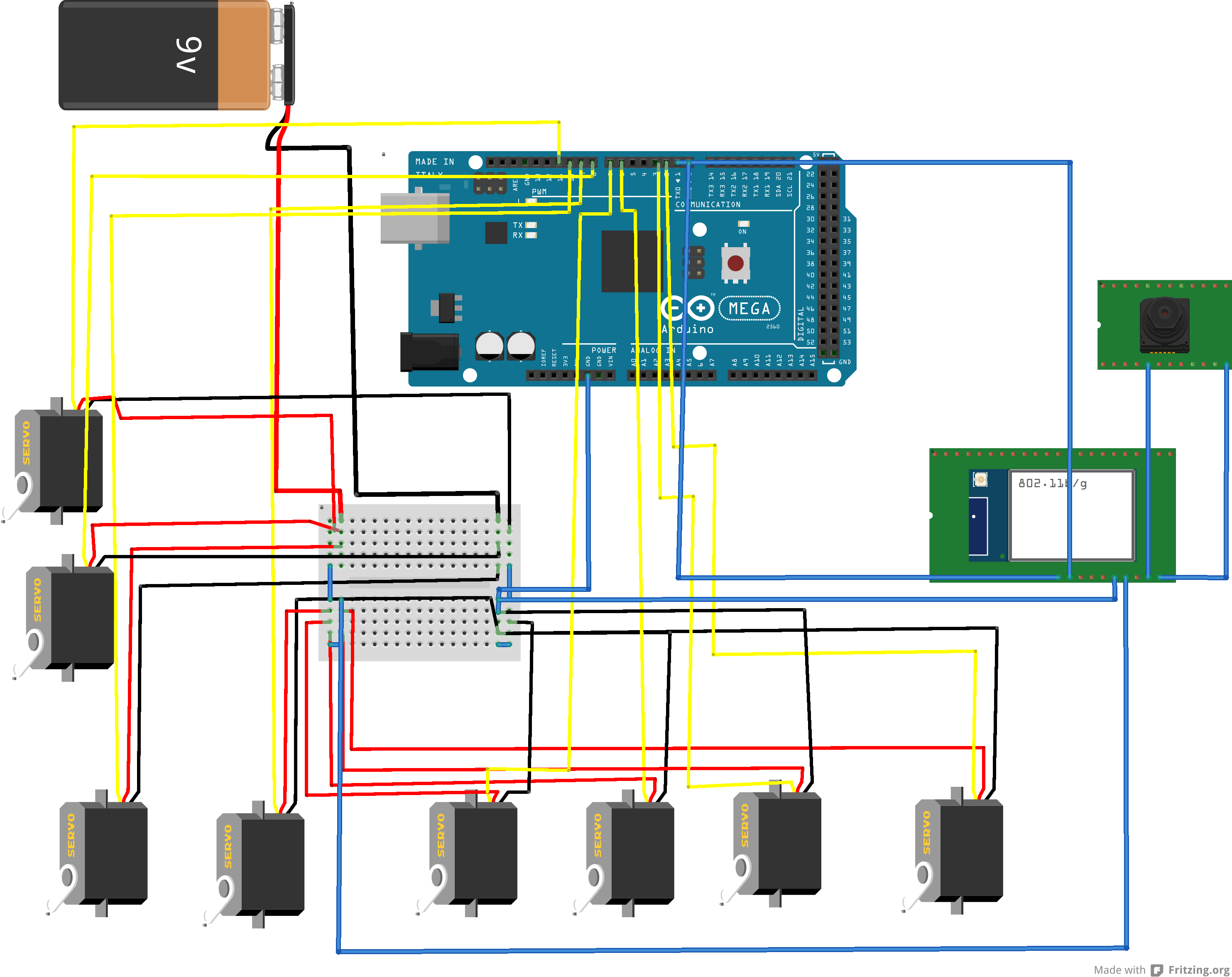
|
|
项目视频: |
|
|
|
下载专区: |
|
项目分工:
|
|
感想与不足: 本次做魔方机器人对我们三个人而言都是一种极大的挑战:
|
|
致谢:
|
|
返回项目主页 |
| Copyright © 2017 GCL , USTC |