坐标变换与其它常用坐标系
空间解析几何
坐标变换与其它常用坐标系
坐标变换
空间中,两个不同的右手直角坐标系,其中一个可以通过平移与旋转与另一个重合。
- 设和是 空间中两个不同的右手直角坐标系。
- 点在两个坐标系下的坐标分别是和。
- 下面,来看两个坐标之间的关系。
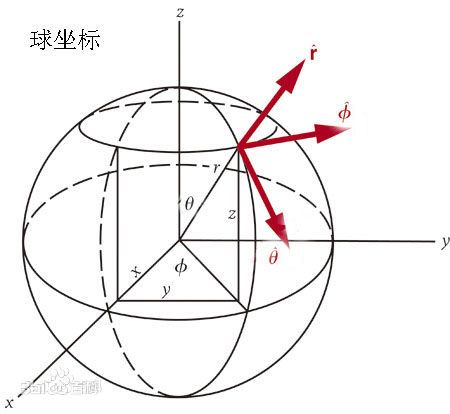
其它常用坐标系
前面介绍的坐标系,是由一个原点和三个不共面的向量组成。这样的空间坐标系是线性坐标系, 它的一个坐标分量等于常量所对应的面都是平面。
下面介绍一些常见的非线性坐标系。
11.
求过点(0,-3,1)且与Oxy平面的交为圆的球面的方程
https://mooc1-api.chaoxing.com/ananas/latex/render?callback=jQuery1720304907071950090371646293920428&formula=x%5E2%2By%5E2%2B4z%5E2%3D1&=1646293944636