|
张瑞
中国科学技术大学数学科学学院
rui@ustc.edu.cn |
坐标变换
空间中,两个不同的右手直角坐标系,其中一个可以通过平移与旋转与另一个重合。
设和是
空间中两个不同的右手直角坐标系。点在两个坐标系下的坐标分别是和。
下面,来看两个坐标之间的关系。
平移
设和的坐标系坐标轴方向相同,原点不同,即, ,
, 。 且有
注意到,
- 并设(即在坐标系下的坐标是,则有
- 因此,得到平移时的坐标变换公式
例 1. (例8.4.1) 下面方程刻划的是什么图形
解. 配方,原方程变为
将坐标原点平移到,即取
代入得到
是个(旋转)椭球面。
旋转
设两个右手直角坐标系和的原点相同,但坐标轴方向不同。
设两个坐标系的基向量和
之间的夹角为
| | | |
|---|
| | | | |
|---|
| | | |
| | | | |
| | | |
| | | | |
| | | |
| | | | |
| | | |
利用方向余弦表示,知道
又, , 两两正交,因此有
点在两个坐标系下的坐标分别是和,则有
由线性代数的知识,存在正交阵,成立
若点在两个坐标系下的坐标分别是和,则有
得到旋转坐标变换公式:
同样,有
由正交,因此
则有
当一个轴不动时(如轴不动),则有
| | | |
|---|
| | | | |
|---|
| | | |
| | | | |
| | | |
| | | | |
| | | |
| | | | |
| | | |
坐标转换公式为
例 2. (例8.4.2) 将直角坐标系绕轴逆时针旋转后,得到新坐标系。
试表示新旧坐标间的变换关系,并给出方程在新坐标系下的表达式
解. 依题意,有
代入方程后,得到
,
即有
是一个马鞍面。
例 3. (例8.4.3) 利用坐标变换化简方程
并指出它是什么曲面。
其它常用坐标系
前面介绍的坐标系,是由一个原点和三个不共面的向量组成。这样的空间坐标系是线性坐标系,
它的一个坐标分量等于常量所对应的面都是平面。
下面介绍一些常见的非线性坐标系。
平面的极坐标系
在平面上取定一点(称为极点),从极点引一条射线(称为极轴),
再选定一个长度单位和角度的正向(通常取逆时针方向为正),这样就构成的平面上的极坐标系。
对于平面上任意一点,用表示到的距离(线段的长度,或向量的长度),表示从极轴到向量的正向夹角(称为辐角),
则数组可以确定点在空间的位置,并称为点的极坐标。
的取值范围是,的取值范围是。
在直角坐标中,取为极点,轴为极轴。
则平面上任意一点的直角坐标和极坐标的变换关系为
的位置向量可以表示为
注.
可以发现,为常数是平面上以为圆心的圆, 为常数是从出发的射线。
柱坐标系
在空间坐标系中,将平面坐标换成极坐标。
即空间中点用坐标来表示,其中
其中, , 。
这样给出了空间的柱坐标系。 称为点的柱坐标。
注.
在柱坐标中,表示一个圆柱面,表示以轴为边的半平面。
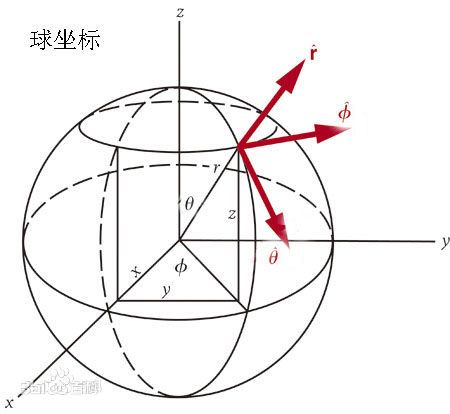
球坐标系
设位置向量与轴的夹角为,
在平面上的投影向量是,
则有
将用平面的极坐标来表示,设辐角是,则有
记,则,从而有
即有
其中, , 。
称为的球坐标,形成的坐标系是球坐标系。
|
http://www.360doc.com/content/18/0421/08/54440535_747456429.shtml |
在曲线上取两点和,其横坐标分别为与,
则两点的距离为 |