曲线拟合
最小二乘法
曲线拟合
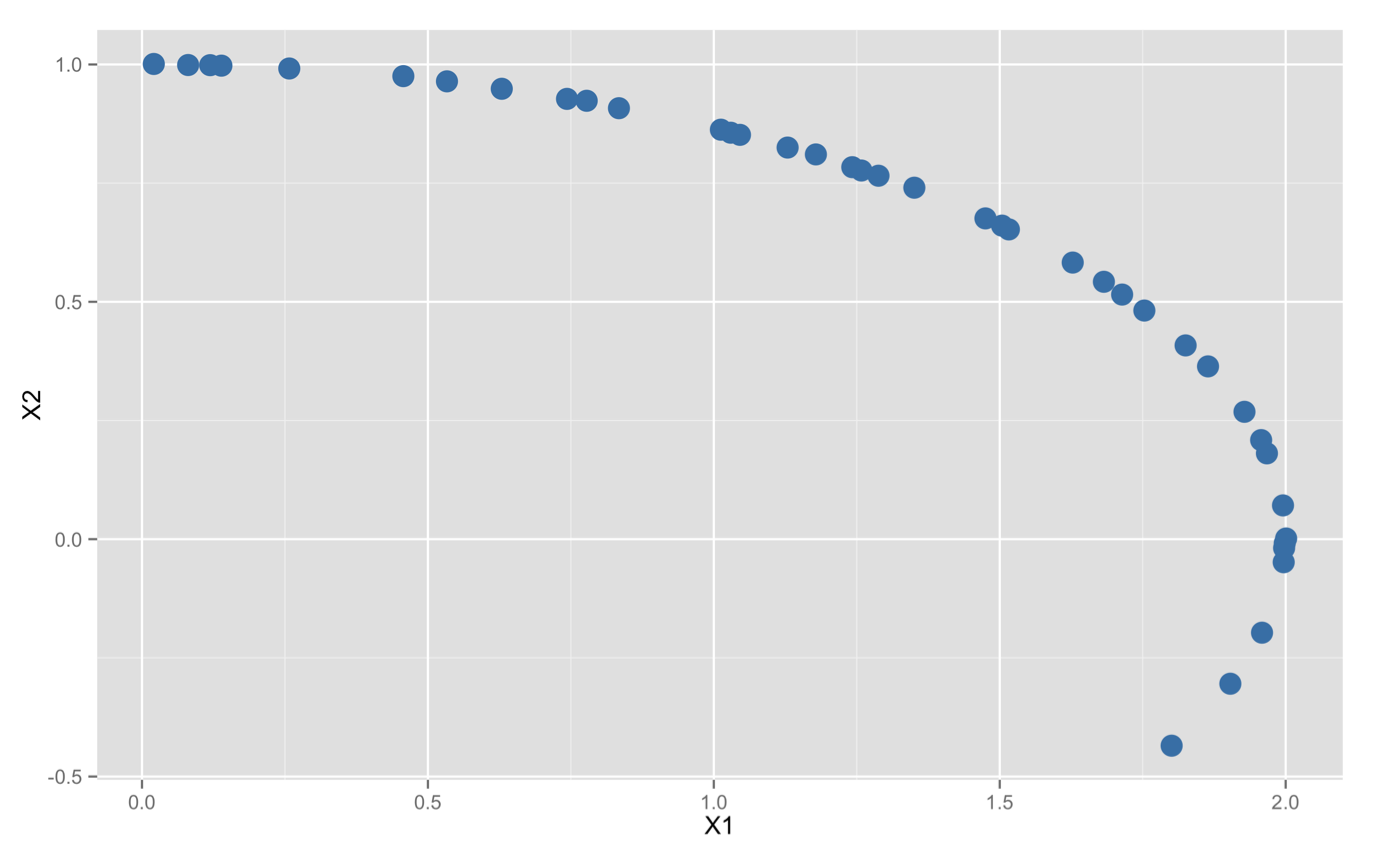
例 1. 已知行星的运行轨道是一个椭圆。几百个观测数据,这些数据会带有误差,因此它们几乎不可能满足同一个椭圆方程。如何计算行星的运行轨道?
拟合的定义
定义 1.
是定义在区间上的函数,, 是区间上互不相同的点。是已知的函数空间。
在上找函数,使得在某种范数意义下最小。函数称为的拟合函数。
注. 拟合同插值类似,都是构造近似函数的手段。
注. 范数可以用来度量线性空间中两个向量之间的距离,当然也可以度量函数空间中两个函数是否靠近。
最小二乘问题
定义 2.
在拟合问题中,取的范数为2-范数的话,得到的问题就叫作最小二乘问题(Least Square)。
即,找,使得
达到最小。
注. 若找满足最小,就称为最小一乘问题。

矛盾方程组
问题. 行星的运行轨道是一个椭圆。现在有成百上千的观测数据,如何确定这个行星的运行轨道?
解. 这些观测数据应该满足同一个椭圆方程
即有
这是一个5个未知量,很多个方程的线性方程组。方程的个数比未知量的个数要多,这是一个矛盾方程组。
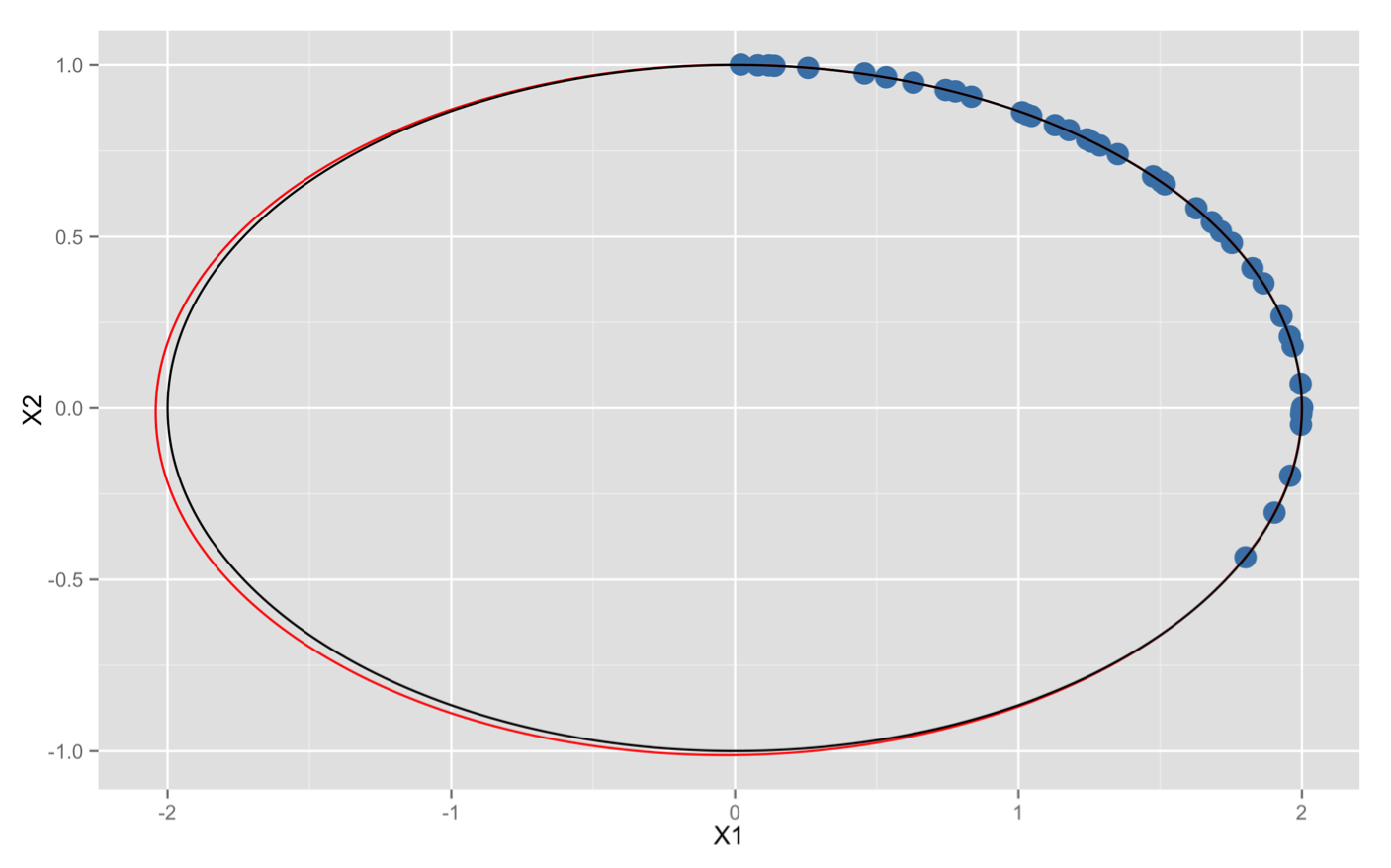
黑线是真正的小行星轨道,红线是线性最小二乘法估计出来的轨道。
取,对于基函数, Python中使用Decimal类型,采用6位小数计算,得到对应的系数为
Coefficients: [Decimal('7.82965') Decimal('-0.948494') Decimal('0.0496562')]采用16位小数计算,得到系数是
Coefficients: [Decimal('1.850147483432168') Decimal('0.190651845528236')
Decimal('-0.004540738661120082')]
连续函数的逼近
除了在一组离散点上要求拟合外,同样可以在一个区间上要求逼近。