| |
| |
Research Areas: Bioinspired/biomimetic Robots | Soft Robots | Liquid Metal Robots |
|
I. Bioinspired/biomimetic Robots |
| |
This work investigates an array of solutions to meet the multifaceted requirements of developing intelligent bionic robots. The robots include underwater robot, multi-locomotory-modal robot, legged robots, and amphibious robot. The work introduces transformable locomotory mechanism and variable stiffness mechanism actuated by smart materials into robot locomotion in various environments, with which the robots are capable of perceiving and understanding dynamically changing or unstructured environments, and planning their own actions to attain a certain goal. |
| |
|
| |
I.1 Amphibious Robot |
|
AmphiHex-1 |
| |
 |
|
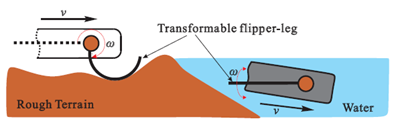
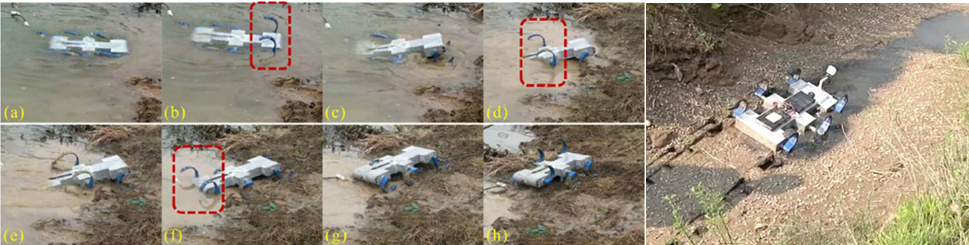
An amphibious robot can locomote in amphibious environments,including walking on rough terrains, maneuvering underwater, and passing through soft muddy or sandy substrates in the littoral area between land and water. However, developing an amphibious robot is challenging, especially when it requires a high locomotory performance in soft substrates and acombination of different propulsion methods. To tackle such a challenge, an amphibious robot, known as AmphiHex-I, with novel transformable flipper-leg composite propulsion mechanisms has been proposed and developed. |
|
| Design concept / Transition with transformable flipper-leg / Detection of Oncomelania hupensis beside Changjiang River |
AmphiHex-I: Locomotory Performance in Amphibious Environments with Specially Designed Transformable Flipper-legs, Shiwu Zhang*, Youcheng Zhou, Min Xu, Xu Liang, Jiming Liu, and Jie Yang. IEEE/ASME Transactions on Mechatronics. 21(3): 1720-1731, 2016  ; Video can be download from IEEE Xplore Digital Library ; Video can be download from IEEE Xplore Digital Library |
| |
|
| |
AmphiHex-II |
| |
|
| |
 |
|
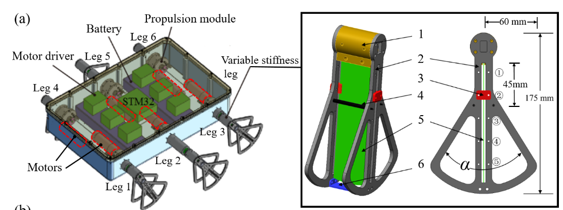
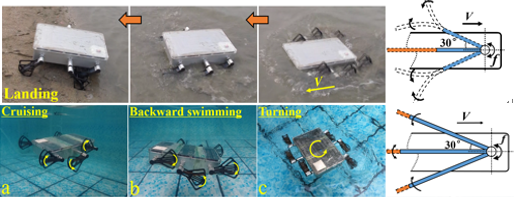
We developed a newly designed amphibious hexapod robot-AmphiHex-II. This robot possesses six newly designed variable stiffness legs for adapting various complex environments. This novel design of the variable stiffness leg seamlessly incorporates the advantages of both semicircular walking legs and the swimming fexible fippers. The legs are constructed by rigid fan-shaped frames, which work as walking legs for terrestrial locomotion and protect the contained flexible fippers used for aquatic locomotion during terrestrial operations. The stiffness of legs can be adjusted to an effective degree by adjusting the positions of sliders manually. |
 ...... ......
|
| Structure of the robot and the variable stiffness leg.............Landing and swimming with the variable stiffness legs |
| On a CPG-based Hexapod Robot: AmphiHex-II with Variable Stiffness Legs, Bin Zhong, Shiwu Zhang*, Min Xu, Youcheng Zhou, Tao Fang, Weihua Li*, IEEE/ASME Transactions on Mechatronics. 23(2) 542-551, 2018; Video can be download from IEEE Xplore Digital Library |
| |
|
| |
AmphiHex-III |
| |
|
| |
 |
|
AmphiHex-III is under development in cooperation with Prof. Haoyao Chen from Harbin Institute of Technology (Shenzhen) |
| |
|
| |
|
| |
I.2 Adaptive Propulsion |
| |
|
| |
 |
|
This work aims to explore the methods to improve the prosulsive performance of bioinspired propulsion mechanisms, inclduing ununiform distribution of stiffness, variable stiffness, variable shape and variable area, etc. The magnetorheological-fluid /magnetorheological-elstomer (MRF/MRE) based variable stiffness mechanisms can perform a rapid switch between designed stiffnesses, which can benifit the locomotion of the robots in complex environments and/or for changing tasks. |
| A highly stiffness-adjustable robot leg for enhancing locomotive performance, M.D.Christie, S.Sun*, D.H.Ning, H.Du, S.W.Zhang*, W.H.Li. Mechanical Systems and Signal Processing, Volume 126, Pages 458-468, 2019 |
| Design and modelling analysis of a changeable stiffness robotic leg working with magnetorheological technology, Zijun Jing, Shuaishuai Sun, Yiming Ouyang, Shiwu Zhang*, Weihua Li*, Jinjin Zheng. Journal of Intelligent Material Systems and Structures. Vol. 29 (19): 3725-3736, 2018 |
| A torsional MRE joint for a C-shaped robotic leg, M D Christie, Shuaishuai Sun, Donghong Ning, Haiping Du, Shiwu Zhang* and Weihua Li*, Smart Materials and Structures 26(1): 015002, 2017 |
| Theoretical and experimental study on a compliant flipper-leg during terrestrial locomotion. Tao Fang, Youcheng Zhou, Shikun Li, Min Xu, Haiyi Liang, Weihua Li, Shiwu Zhang*. Bioinspiration & Biomimetics 11(5):056005, 2016 |
| A Highly Adaptive Magnetorheological Fluid Robotic Leg for Efficient Terrestrial Locomotion. Nan Jiang, Shuaishuai Sun, Yiming Ouyang, Min Xu, Weihua Li, Shiwu Zhang*. Smart Materials and Structures 25(9):095019, 2016 |
| Development of a bio-inspired transformable robotic fin. Yikun Yang, Yu Xia, Fenghua Qin, Min Xu, Weihua Li, Shiwu Zhang*. Bioinspiration & Biomimetics 11(5):056010, 2016 |
| |
|
| |
|
| |
I.3 Underwater Robot |
| |
|
| |
Bio-inspired Long Fin Underwater Robot |
| |
|
|
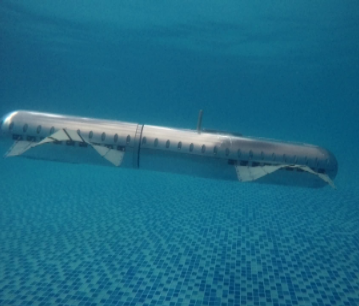
The developed bioinspired long-fin underwater robot possesses a high maneuverability. It can perform a turning maneuver with zero turning radius. The highest swimming speed is about 50cm/s. |
| The work is in cooperation with Prof. Fenghua Qin from Department of Modern Mechanics, USTC |
| Paper is under preparation |
| |
|
| |
Bionic Scallop Robot |
| |
 |
|
Inspired by a scallop's special underwater propulsion mechanism, we designed and prototyped a scallop robot capable of clapping and swimming. In this work, an artificial velum was used to work as a check valve to stimulate the robot’s swimming. A couple of supporting plates were fixed on the robot shells to achieve the modulation of clapping process of the shells. The scallop robot can move at a maximum average and instantaneous speed of 3.4 and 4.65 body length per second, respectively. This scallop robot provides a new propulsion mechanism in underwater bionic robots; it is also of help to understand the swimming principle of scallops in terms of jet propulsion and clapping motion.
|
| |
| Development of a Biomimetic Scallop Robot Capable of Jet Propulsion, Yumo Wang, Shunxiang Pang, Hu Jin*, Min Xu, Shuaishuai Sun, Weihua Li, Shiwu Zhang*, Bioinspiration & Biomimetics 15(3):036008, 2020 |
| |
|
| |
|
| |
Integrative Biomimetic Robofish |
| |
 |
|
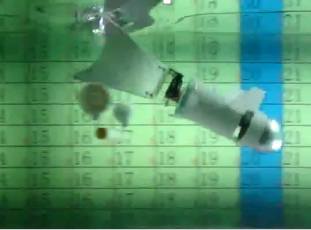
Flying insects and swimming fishes have high effiency and high maneuverability in air and water, respectively. Their wings and fins have evolved for many ages to adapt to propelling in the complex environment. Here, an integrative biomimetic robotic fish is proposed and developed,which combines the advantages of insect wings and fish fin to achieve a high agility underwater. In the robotic fish, two caudal fins were equipped at the tail of the robotic fish in parallel as the main propulsion mechanism, the opposite flapping of the two caudal fins generates mutually opposing lateral forces during cruising, which leads to a stable and high-performance swimming. In addition, two pectoral fins that mimic the function of insect wings were equipped at two sides of the robotic fish, which enhances the robotic fish maneuverability in vertical plane. Moreover, a central pattern generator model was designed to achieve the versatile maneuvering motions, motion switching, and autonomous swimming with an obstacle avoiding ability. |
| . |
| The work is in cooperation with Prof. Fenghua Qin from Department of Modern Mechanics, USTC. The latest prototype of the robotic fish with dual-caudal fins can swim with a high speed (about 3 BL/s) |
| . |
Design and Control of an Agile Robotic Fish with Integrative Biomimetic Mechanisms. Shiwu Zhang*, Yun Qian, Pan Liao, Fenghua Qin, and Jiming Yang. IEEE/ASME Transactions on Mechatronics. 21(4): 1846-1857, 2016  Video can be download from IEEE Xplore Digital Library Video can be download from IEEE Xplore Digital Library |
| |
|
| |
Bionic Robotic Carp |
| |
 |
|
A carangiform robotic fish with 4-DoF (degree of freedom) tail had been developed. The robotic fish has capability of swimming under two modes that are radio control and autonomous swimming. Size: 650×80×200mm ;Weight:3.8Kg; Sink/Rise: 0.5m; Maximum Speed: 0.48m/s (0.8BL/s); Maximum acceleration: 0.4m/s2; Remote control/Autonomous Swimming /Avoiding obstacle. |
| |
| Parametric Research of Experiments on a Carangiform Robotic Fish, Qin Yan, Zhen Han, Shiwu Zhang, Jie Yang, Journal of Bionic Engineering, vol. 5(3): 95-101, 2008 |
| |
|
| |
II. Soft Robots (SMA based) |
| |
Soft robots may potentially be used for human services and complex environmental locomotion. The bodies of the soft robots are made from soft materials to make them safe for human interactions and to enable them to deform enough to adapt to soft or rough terrains. |
| |
|
| |
II.1 SMA Pectoral Fin |
| |
 |
|
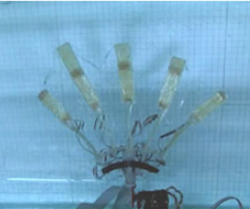
Pectoral fins play an important role in the fish swimming performance,especially in maneuverability underwater This work presents the swimming propulsion by means of a flexible and lightweight pectoral fin inspired by a Koi Carp. The fin is driven by embedded shape memory alloy (SMA) wires. |
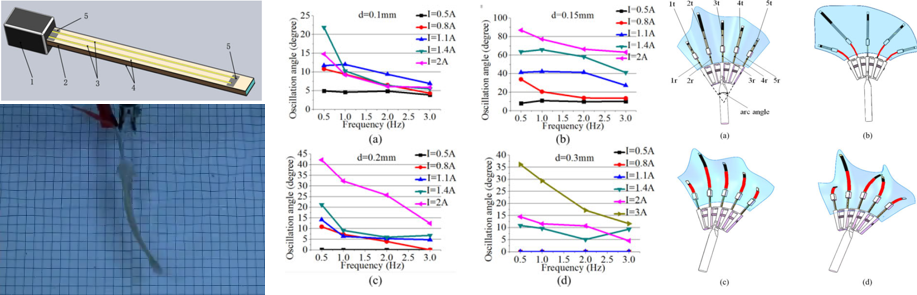 |
| SMA fin ray / The bending angle of SMA fin ray under different conditions / SMA fin with variable shapes |
Design and Implementation of a Lightweight Bio-Inspired Pectoral Fin with Complex Motions. Shiwu Zhang*, Bo Liu, Qin Yan, Lei Wang, K.H. Low, and Jie Yang. IEEE/ASME Transactions on Mechatronics. Vol. 19(6), 1773-1785, 2014 |
Dynamic Characteristics of Planar Bending Actuator Embedded with Shape Memory Alloy. Yong Du, Bo Liu, Min Xu, Erbao Dong, Shiwu Zhang*, Jie Yang. Mechatronics. Vol.25 pp.18-26, 2015 |
| A Novel Implementation of a Flexible Robotic Fin Actuated by Shape Memory Alloy. Qin Yan, Lei Wang, Shiwu Zhang* and Jie Yang. Journal of Bionic Engineering. vol 9, no. 2. pp. 156-165, 2012 |
| |
|
| |
II.2 Soft SMA Arm |
| |
 |
|
The practical applications of SMA soft robots are limited because their body stiffness is too low and the deformation is continuous, which make it diffcult to control their movements. In this work, the design and implementation of a soft robotic arm driven by shape memory alloy (SMA) coils are reported. The precision control of the SMA arm was realized based on feedback signals from the embedded Hall sensors. This soft robotic arm can follow a two-dimensional motion with a relatively high accuracy; indeed, it displays quite a remarkable performance considering its low cost, simple structure, easy control, and small bending error. Since this soft arm can be used as the basic driving unit of a soft robot capable of manipulating and locomoting, it has shed light on the applications of SMA soft robots. |
 |
| SMA soft arm performs a step bending motion and a two dimensional circular motion |
| Design and Implementation of a Soft Robotic Arm Driven by SMA Coils, Hao Yang, Min Xu*, Weihua Li and Shiwu Zhang*. IEEE Transactions on Industrial Electronics 66(8): 6108-6116, 2019; Video can be download from IEEE Xplore Digital Library |
| |
|
| |
II.3 SMA Planar actuator |
| |
 |
|
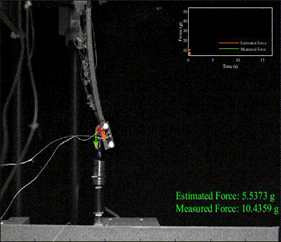
Shape memory alloys (SMAs) have advantages of high power-to-weight ratio, silent operation, and high response speed, which make them suitable for fabricating soft, compact, and muscle-like soft actuators with various transformation capabilities. However, it is challenging to precisely control SMA-based soft actuators and robots because of the lack of explicit dynamics-based control method. In this article, a linear phase transition model of SMA is derived to express the dynamic model of an SMA planar actuator (SPA) in an explicit form. Then, a model-based feedback controller considering constraints of strain of the SMA, temperature increment of the SPA, and load increment was built. Strain gauges are used to obtain the bending angle of the SPA as the feedback signal for the controller. Various capabilities of the SPA, such as step response, position tracking with constant angular speed, and motion control with load, were experimentally evaluated. The developed method is meaningful for modeling and control of various SMA-based actuators and robots. |
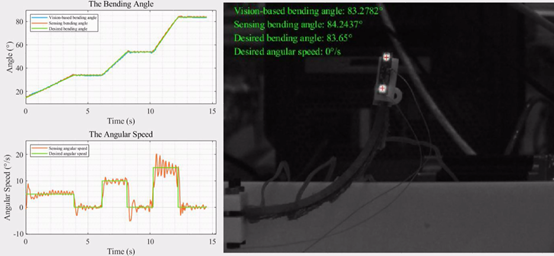 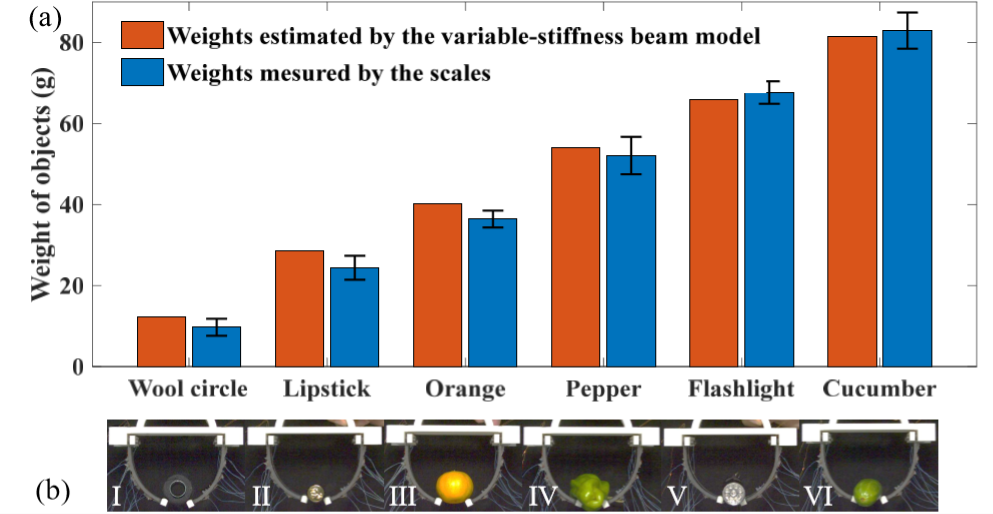 |
| Speed Control of an SMA planar actuator/ SMA planar manipulator grasps various objects and measures their weight |
| Modeling and Motion Control of a Soft SMA Planar Actuator, Hu Jin; Yiming Ouyang; Haoyao Chen; Jingwen Kong; Weihua Li*; Shiwu Zhang*, IEEE/ASME Transactions on Mechatronics 27(2):916-927,2021.Video can be download from IEEE Xplore Digital Library |
| Shape and Force Sensing of a Soft SMA Planar Actuator for Soft Robots, Yiming Ouyang, Hu Jin*, Haoyao Chen, Jingwen Kong, Weihua Li, Shiwu Zhang*, IEEE Robio, 2021. (Best student paper final list) |
| |
|
| |
II.4 Dexterous Hand |
| |
 |
|
|
| Coming soon |
| |
| |
|
| |
|
| |
III. Liquid Metal Robots |
| |
We focus on the actuation ability of the liquid metal and its applications in robotics. This project involves collaboration between multinational groups between Australia, UK, US, and China which are expertise in robotic systems, liquid metal alloys, and microfluidics. |
| |
|
| |
III.1 Wheeled Robot |
| |
 |
|
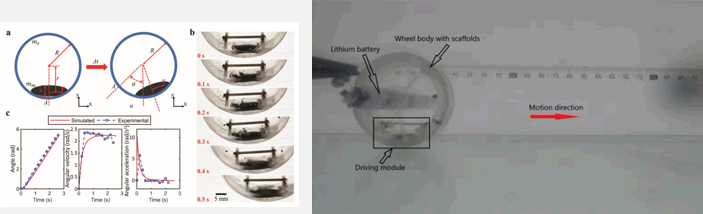
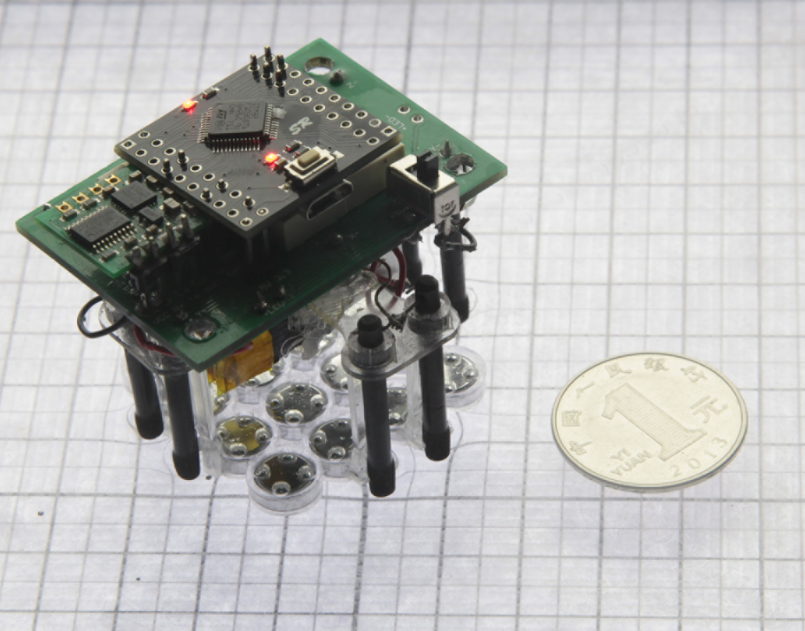
The controlled actuation of gallium liquid-metal (LM) alloys has presented new and exciting opportunities for constructing mobile robots with structural flexibility. However, the locomotion of current LM-based actuators often relies on inducing a gradient of interfacial tension on the LM surface within electrolytes, which limits their application outside a liquid environment. In this work, a wheeled robot using a LM droplet as the core of the driving system is developed that enables it to move outside liquid environment. The LM droplet inside the robot is actuated using a voltage to alter the robot's center of gravity, which in turn generates a rolling torque and induces continuous locomotion at a steady speed. An untethered and self-powered wheeled robot that utilizes mini-lithium-batteries is also demonstrated. This study is envisaged to have the potential to expand current research on LM-based actuators to realize future complex robotic systems. |
|
| The rolling motion of the wheeled robot |
| The work has been reported by New Scientists, RUPTLY, SCMP, CCTV, 光明日报, 新华社, 科技日报, 中国新闻社, 中国科学报, 科技纵览 etc. It was also seletced as Top 10 Annual Research Achievement Award in Annual Conference of China Robot Industry, 2019. |
| |
| A Wheeled Robot Driven by a Liquid Metal Droplet, Jian Wu, ShiYang Tang*, Tao Fang, Weihua Li, Xiangpeng Li*, and Shiwu Zhang*, Advanced Materials 30(51) 1805039, 2018. Video can be download from Wiley Online Library |
| |
|
| |
III.2 Liquid Artificial Muscle |
| |
|
|
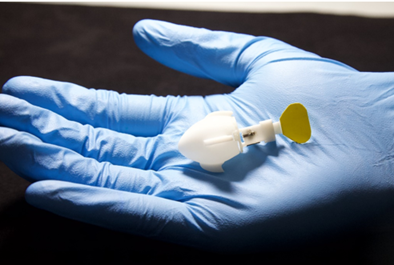
Here, a liquid metal artificial muscle (LMAM) is demonstrated, based on the electrochemically tunable interfacial tension of liquid metal to mimic the contraction and extension of muscles. The LMAM can work in different solutions with a wide range of pH (0–14), generating actuation strains of up to 87% at a maximum extension speed of 15 mm s−1. More importantly, the LMAM only needs a very low driving voltage of 0.5 V. The actuating components of the LMAM are completely built from liquids, which avoids mechanical fatigue and provides actuator linkages without mechanical constraints to movement. The LMAM is used for developing several proof-of-concept applications, including controlled displays, cargo deliveries, and reconfigurable optical reflectors. The simplicity, versatility, and efficiency of the LMAM are further demonstrated by using it to actuate the caudal fin of an untethered bionic robotic fish. The presented LMAM has the potential to extend the performance space of soft actuators for applications from engineering fields to biomedical applications. |
  |
| Liquid metal artificial actuates a miniature robotic fish |
| A Liquid Metal Artificial Muscle. Jian Shu#, Du-An Ge#, Erlong Wang#, Hongtai Ren, Tim Cole, Shi-Yang Tang*, Xiangpeng Li, Xiangbo Zhou, Rongjie Li, Hu Jin*, Weihua Li, Michael D. Dickey, Shiwu Zhang*. Advanced Materials 33 (43), 2103062, 2021 |
| |
|
| |
III.3 Liquid Metal Motor |
| |
 |
|
In this work, a motor is developed based on the electrical actuation of liquid metal droplets without the need for conventional electromagnets. The approach is distinguished by (1) the encapsulation of electrolyte and multiple liquid metal droplets within an enclosed system, and (2) the creation of stable and continuous torque outside a liquid environment. In addition, a liquid metal electrical brush is introduced to operate the motor with low friction and low wear. The unique driving mechanism endows the motor with several advantages, including low friction, no sparking, low noise, versatile working environment, and being built from soft materials that could offer new opportunities for developing soft robotics. |
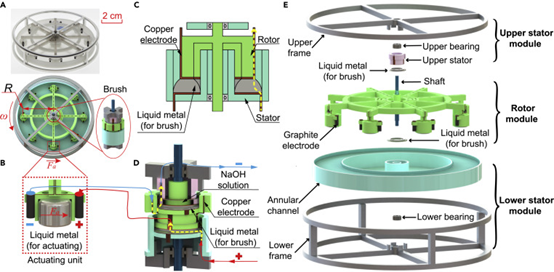  |
| The structure of the liquid metal motor and its actuating |
| Liquid metal motor, Erlong Wang#, Jian Shu#, Hu Jin#, Zhe Tao, Jie Xie, Shi-Yang Tang*, Xiangpeng Li*, Weihua Li, Michael D.Dickey, ShiwuZhang*. iScience 24(1) 101911, 2021. A Vedio can be found on youtube |
| |
|
| |
III.4 Untethered Vehicle |
| |
 |
|
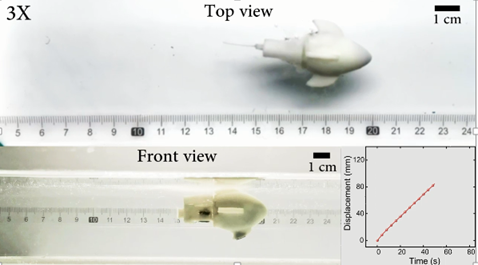
In this work, we report the development of a novel controllable untethered vehicle driven by electrically actuated liquid metal droplets in a sodium hydroxide solution. The vehicle driven by liquid metal droplets possesses many advantages such as working silently, almost wear-free motion, low cost, and low-power consumed, which has great potential to be applied in liquid metal enabled robotics and automation process such as laboratory automation. |
 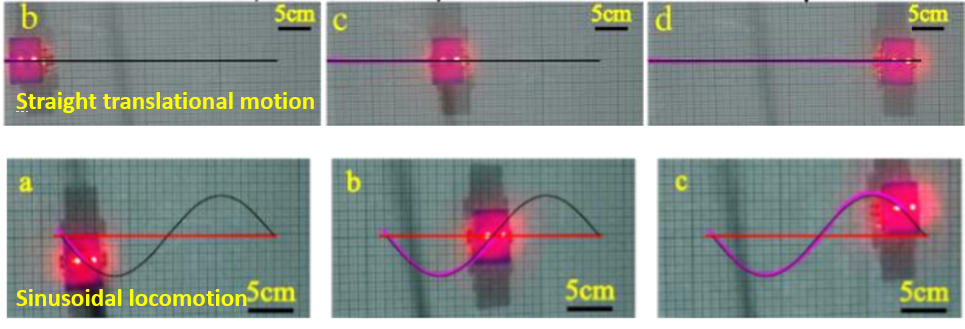 |
| Circular Locomotion, straight translational motion, and sinusoidal locomotion |
| A Controllable Untethered Vehicle Driven by Electrically Actuated Liquid Metal Droplets, Xiangxiang Li, Jie Xie, Shi-Yang Tang, Ronald Xu, Xiangpeng Li*, Weihua Li and Shiwu Zhang*. IEEE Transactions on Industrial Informatics, 15(5): 2535-2543, 2019. Video can be download from IEEE Xplore Digital Library |
| |
|
| |
III.5 Liquid Metal Droplet Robot |
| |
 |
|
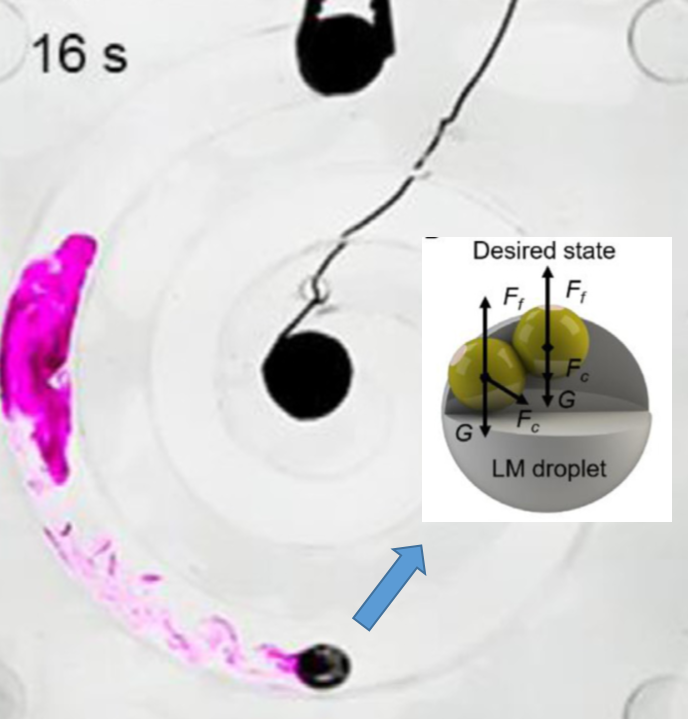
Here, we propose a composite liquid metaldroplet robot (LMDR) which appears as a LM droplet but exhibits an extraordinary actuating performancein 3D space. The LMDR is fabricated by assembling a hollow and spherical-shaped magnetic internalframework (IF) into a LM droplet, and the IF can be disassembled from the LM droplet with the application of an external magnetic field. The maneuver of the LMDR is realized using the interplay of electric andmagnetic fields, and complex actuation especially jumping to avoid obstacles, climbing steep slopes, and rotating its body to the desired posture can be achieved. The hollow IF within the LMDR has a cargocarrying capacity and we demonstrate a proof-of-concept experiment to show the transportation and controlled release of a chemical indicator using the LMDR.The demonstrated capabilities of the LMDR present a promising potential in developing future targeted drug delivery and soft robotic systems with high controllability and multi-functionalities |
 |
| Climbing motion and jumping motion of the LMDR |
| Liquid Metal Droplet Robot, Fangxia Li#, Jian Shu#, Leran Zhang#, Nailin Yang, Jie Xie, Xiangpeng Li*, Liang Cheng, Shaolong Kuang, Shi-Yang Tang*, Shiwu Zhang*, Weihua Li, Lining Sun, Dong Sun. Applied Materials Today Volume 19, June 2020, 100597 |
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
| |
|
|
|
