Designing Planar Deployable Objects via Scissor Structures
Ran Zhang, Shiwei Wang, Xuejin Chen*, Chao Ding, Luo Jiang, and Ligang Liu


(a) |
(b) |
(c) |
(d) |
(e) |
Figure 1: Given a pair of planar curves(a)(b), our system automatically generates a scissor structure that can be deployed from a small compact form in the source shape to an expanded form with shape (e). From left to right, the states at t=0, t=0.25, t=0.5, t=0.75, and t=1 respectively during deployments. |
|
Abstract: Scissor structures are used to generate deployable objects for space-saving in a variety of applications, from architecture to aerospace science. While deployment from a small, regular shape to a larger one is easy to design, we focus on a more challenging task: designing a planar scissor structure that deploys from a given source shape into a specific target shape. We propose a two-step constructive method to generate a scissor structure from a high-dimensional parameter space. |
Paper: |
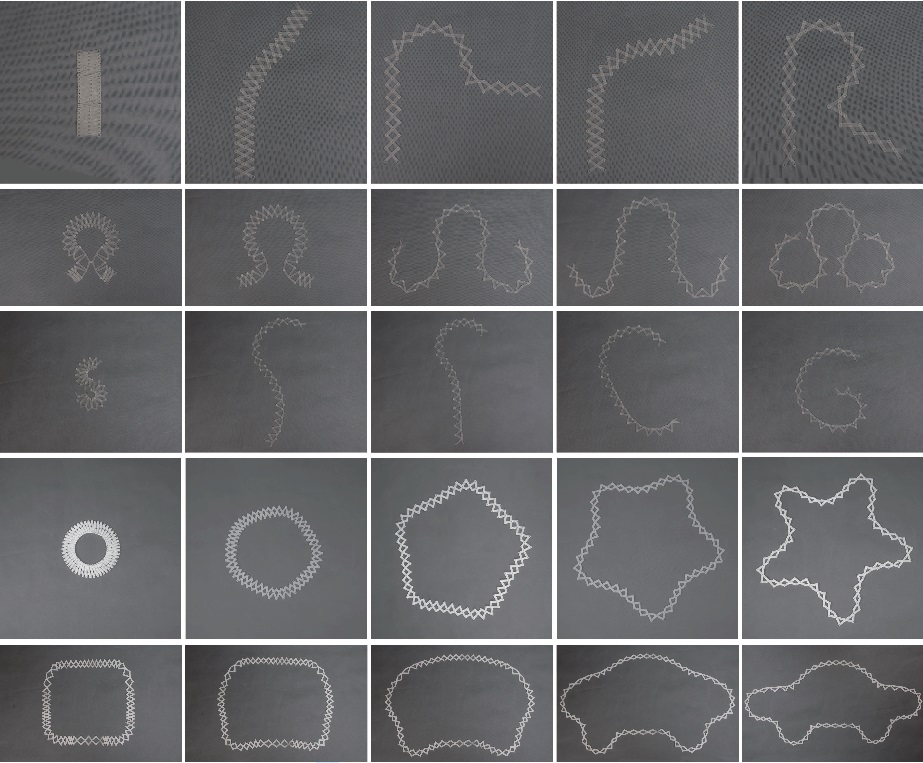
Fig. 2. Photos of the real objects fabr icated by 3D pr inting with SLA mater ial. From left to r ight: t = 0; t = 0: 25; t = 0: 5; t = 0: 75; t = 1. From top to bottom: The deployment of three objects between three pairs of non-closed shapes, which are Capr icor n-Libra and letters S-G, respectively; Two deployable objects between two closed shapes, circle-star, square-car. |

Fig.3 Photos of the real objects fabr icated by a car penter with wood. From left to right: t = 0; t = 0: 25 ; t = 0: 5; t = 0: 75; t = 1; deployed states with actual functionalities. From top to bottom: A wooden chair deployed from a short line shape. (b) A wooden shelf in a star shape deployed from a short line shape. Note the space-saving compact forms of the deployable scissor structures generated by our system. |
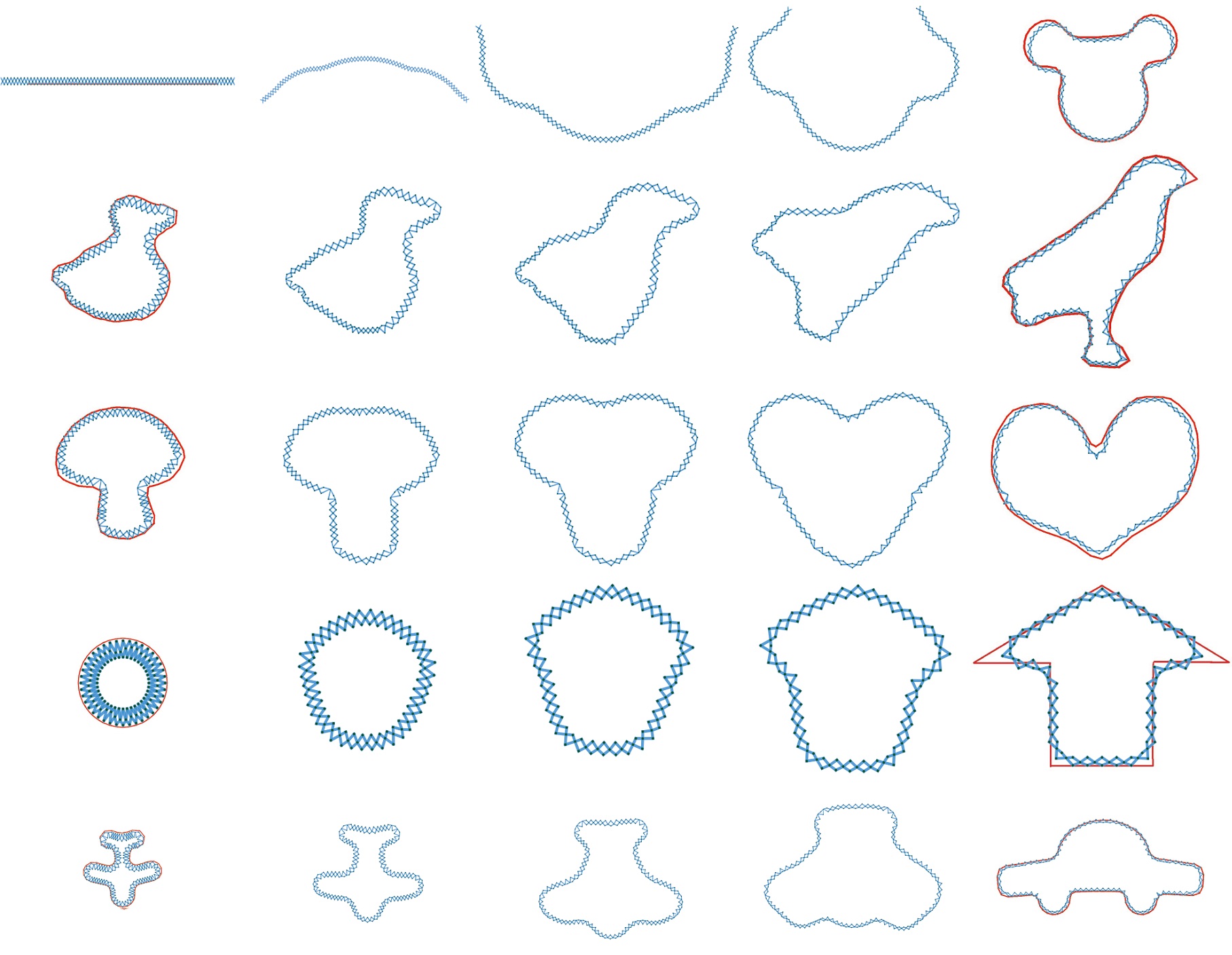
Fig.4 Simulation for complex shapes. Our system is very flexible on a wide range of shapes. From left to right: the source shape and the scissor structure at t=0; the scissor structure at the sampled times t=0.25, t=0.5, t=0.75 during deployment; and the scissor structure at t=1 approximating the target shape. From top to bottom: 2D cases including Line-Micky, a non-closed shape to a closed shape. Four pairs of 2D closed shapes: Duck-bird; Mushroom-heart; Circle-house; Airplane-car. Note the transformations between concave and convex angles in 2D scissor structures. Our geometric optimization guarantees the closure of the scissor structure for closed shapes. |
Acknowledgments: The authors would like to thank the reviewers for their generous reviews that shaped the direction of the paper. Ran Zhang and Shiwei Wang both contributed equally to this paper and should be considered equal first authors. This work was supported by the National Natural Science Foundation of China under No. 61472377, 61331017, 61222206 and partially supported the Fundamental Research Funds for the Central Universities under No. WK2100060011 as well as the One Hundred Talent Project of the Chinese Academy of Sciences. |
Bibtex: @article {Zhang-tvcg15-scissor, title = {Designing Planar Deployable Objects via Scissor Structures}, author = {Ran Zhang, Shiwei Wang, Xuejin Chen, Chao Ding, Luo Jiang, and Ligang Liu}, journal = {IEEE Transactions on Visualization and Computer Graphics}, volume = {}, number = {}, pages = {}, year = {2015}, }
|