

| |
| 首 页 |
| +研究领域 |
| --防碰撞系统 |
| --Zigbee无线网络 |
| --虚拟仪器技术 |
| --回转误差测量 |
| --线阵CCD应用 |
| 学术会议 |
| 课程设置 |
| Lamost防碰撞系统 | |
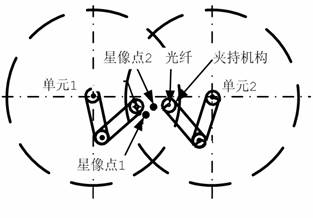
大天区多目标光纤光谱天文望远镜LAMOST是一台兼备大视场和大口径的反射式施密特天文望远镜,其有效通光口径为4米,焦距为20米,视场达21平方度,可观测的覆盖天区超过2万平方度,在它固定的线直径为1.75米的焦面板上,按要求在观测对象的位置上布置了4000根光纤,通过选择最佳的观测时机和适当的优化组合,可以同时对几千个天体目标进行观测。LAMOST在常规观测下,可以进行测量暗至21.0等的恒星或者是暗至20.7等的星系。 |
|
| 基于Zigbee无线网络系统 <返回 | |
Zigbee的基础是IEEE 802.15.4,是IEEE无线个人区域网(Personal Area Network,PAN)工作组的一项标准,称作IEEE 802.15.4(Zigbee)技术标准。Zigbee不仅只是802.15.4的名字。IEEE仅处理低级MAC层和物理层协议,因此Zigbee联盟对其网络层协议和API进行了标准化。完全协议用于一次可直接连接到一个设备的基本节点的4K字节或者作为Hub或路由器的协调器的32K字节。每个协调器可连接多达255个节点,而几个协调器则可形成一个网络,对路由传输的数目则没有限制。Zigbee联盟还开发了安全层,以保证这种便携设备不会意外泄漏其标识,而且这种利用网络的远距离传输不会被其它节点获得。 Zigbee无线传输技术> Zigbee联盟成立于2001年8月。2002年下半年,英国Invensys公司、日本三菱电气公司、美国摩托罗拉公司以及荷兰飞利浦半导体公司四大巨头共同宣布,它们将加盟“Zigbee 联盟”,以研发名为“Zigbee”的下一代无线通信标准,这一事件成为该项技术发展过程中的里程碑。 到目前为止,除了Invensys、 三菱电子、摩托罗拉和飞利浦等国际知名的大公司外,该联盟大约已有150家成员企业,并在迅速发展壮大。其中涵盖了半导体生产商、IP服务提供商、消费类电子厂商及OEM商等,例如:Honeywell、Eaton和Invensys Metering Systems等工业控制和家用自动化公司,甚至还有像Mattel之类的玩具公司。所有这些公司都参加了负责开发Zigbee物理和媒体控制层技术标准的IEEE 802.15.4工作组。 Zigbee技术的主要特点包括以下几个部分: * 数据传输速率低:只有10k字节/秒到250k字节/秒,专注于低传输应用; * 功耗低: 在低耗电待机模式下,两节普通5号干电池可使用6个月到2年,免去了充电或者频繁更换电池的麻烦。这也是Zigbee的支持者所一直引以为豪的独特优势; * 成本低:因为Zigbee数据传输速率低,协议简单,所以大大降低了成本。且Zigbee 协议免收专利费。 * 网络容量大: 每个Zigbee网络最多可支持255个设备,也就是说,每个Zigbee设备可以与另外254台设备相连接; * 时延短:通常时延都在15毫秒至30毫秒之间; * 安全: Zigbee提供了数据完整性检查和鉴权功能,加密算法采用AES-128,同时可以灵活确定其安全属性; * 有效范围小: 有效覆盖范围10~75米之间,具体依据实际发射功率的大小和各种不同的应用模式而定,基本上能够覆盖普通的家庭或办公室环境; * 工作频段灵活: 使用的频段分别为2.4GHz、868MHz(欧洲)及915MHz(美国),均为免执照频段。 随着研究的进一步深入,传感器将变得更小,而且功能会越来越多。最终,他们可能会微缩到尘埃大小。届时,数以千计的微小传感器或者称为“智能尘埃”将被释放到大气中来检测任何东西。目前实验室希望Zigbee成功应用在Lamost现场无线通讯中。 |
|
| 虚拟仪器技术<返回 | |
虚拟仪器(Virtual Instrument,简称VI) 是由计算机硬件资源、模块化仪器硬件和用于数据分析、过程通讯及图形用户界面的软件组成的测控系统;是一种由计算机操纵的模块化仪器系统。它利用PC计算机显示器(CRT)的显示功能模拟传统仪器的控制面板,以多种形式 |
|
机床的工作性能直接影响了零件的加工精度,机床主轴是工件或刀具的位置基准和运动基准,实验结果表明:精密车削的圆度误差约有30%~70%是由于主轴的回转误差引起的,且机床精度越高,所占比例也越大,通过回转轴运动误差的测定,可对机床进行状态监测和
 回转误差测试>故障诊断,预测机床在理想加工条件下所能达到的最小形状误差和粗糙度,还可用于机床加工补偿控制和评价主轴的工作精度,以及判断误差产生的原因。因此,主轴回转运动误差的测量非常重要。 要想对主轴进行准确的测量,首先必须明确主轴回转精度的概念。对于主轴的要求集中到一点,就是在运转的情况下它能够保持轴心线的位置稳定不变,也就是所谓的回转精度。主轴的回转精度不但和主轴部件的制造精度(包括加工精度和装配精度)有关,而且还和受力后的变形有关,并且随着主轴转速的增加,还需要解决主轴轴承的散热问题,不过,主轴部件的制造精度是主轴回转精度的基础。 实验室力求在摒弃传统测量方法必要的误差分离的同时,开发出一套CCD光电检测系统直接测量回转轴的回转误差,实验室近年一直从事国家重点项目“多目标光纤光谱望远镜”焦面机构控制系统的研究,积累了大量利用CCD进行光斑位置测量以及处理的经验;同时进行了一些回转误差测量方法的研究,目前已经在CQB6232机床上初步建立了一套基于labview的回转误差测量系统,可以用标准球—微位移传感器自动测量主轴的回转误差,也可以用CCD进行新型回转误差方法的研究。这些工作已经开始发表。 |
|
1.扫描梁测量系统的机械结构设计: |
|
联系我们:
|