We are devoted to develop novel mechanism-based soft sensors that can meet the requirements of low-detection limit, repeatability, and durability for real-world applications in robotics, wearables, healthcare systems and human-machine interactions. And we also investigate sensor related enabling technologies, from sensing electronics, signal processing, multi-sensor fusion, to advanced fabrications and functional materials.
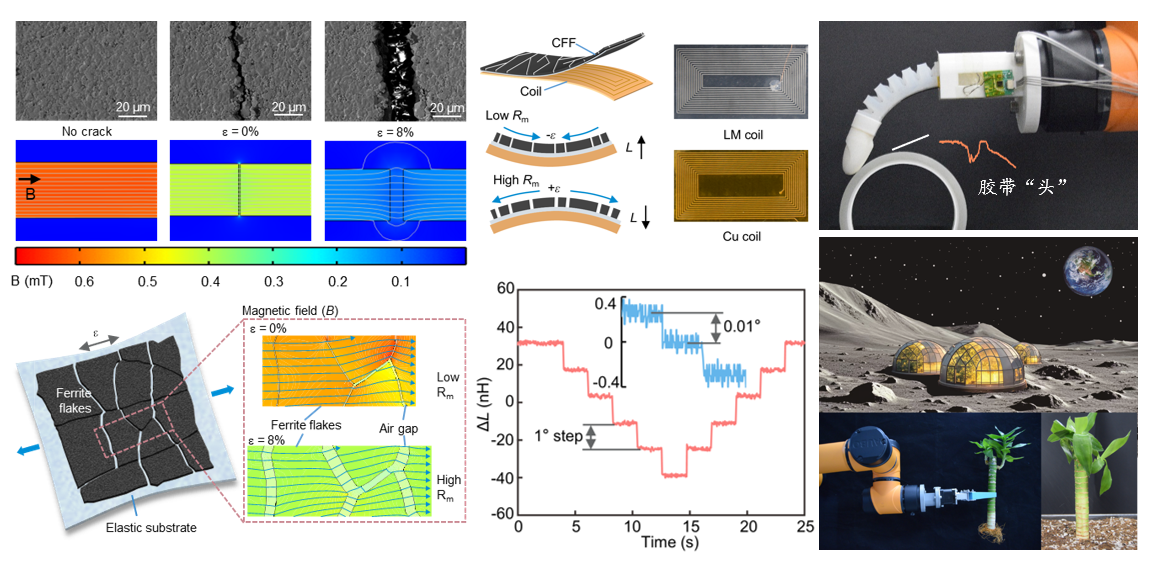
Magnetic Crack-based Pizeoinductive Sensors (MC-PIS)
In this study, we present a magnetic crack-based piezoinductive sensor (MC-PIS), which exploits magnetic flux variation of a cracked ferrite film (CFF) and its resultant effect on the inductance of an electric coil placed below the ferrite film. It can detect bidirectional bending with a precision of 0.01° from -200° to 327°, showing maintained performance when submerged in hot and cold water, scratched in half, or run over by a car. The MC-PIS opens a new paradigm to develop ultrasensitive yet extreme robust sensors in real-world robotics applications.
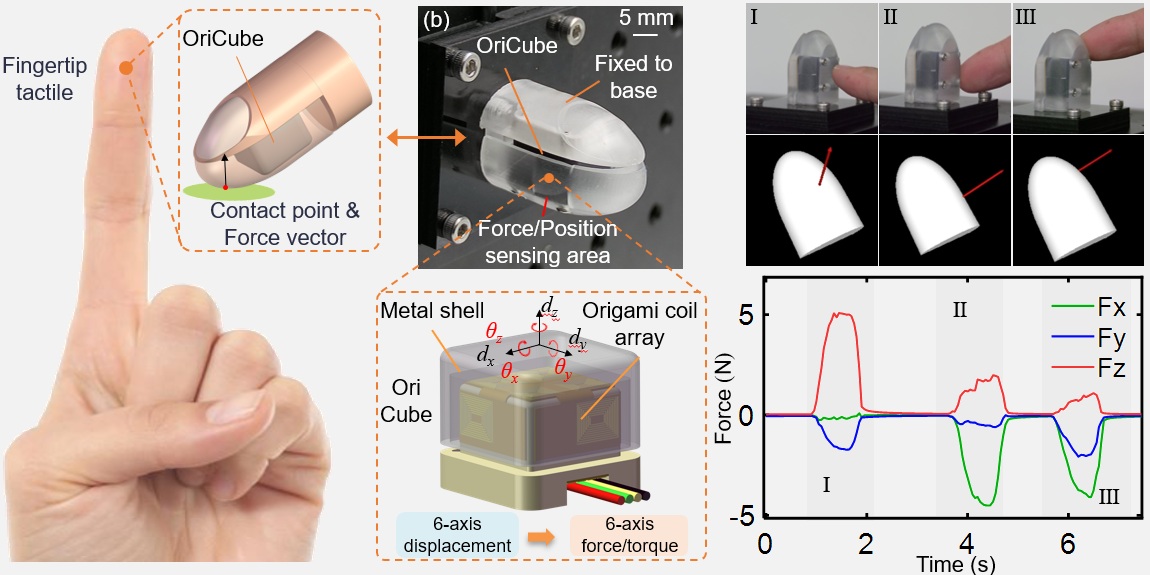
OriCube: Fingertip-Size Six-Axis Force Sensor
We have developed a fingertip-size, fully integrated inductive six-axis force/torque sensor inspired by origami structures. By utilizing an array of origami-based coils to detect the displacement and rotation of a metallic shell through eddy current coupling, the sensor achieves self-decoupled six-axis force and torque measurements. The integration of an OriCube sensor within the curved surface of a fingertip enables real-time tactile perception, including contact position and force vector detection.
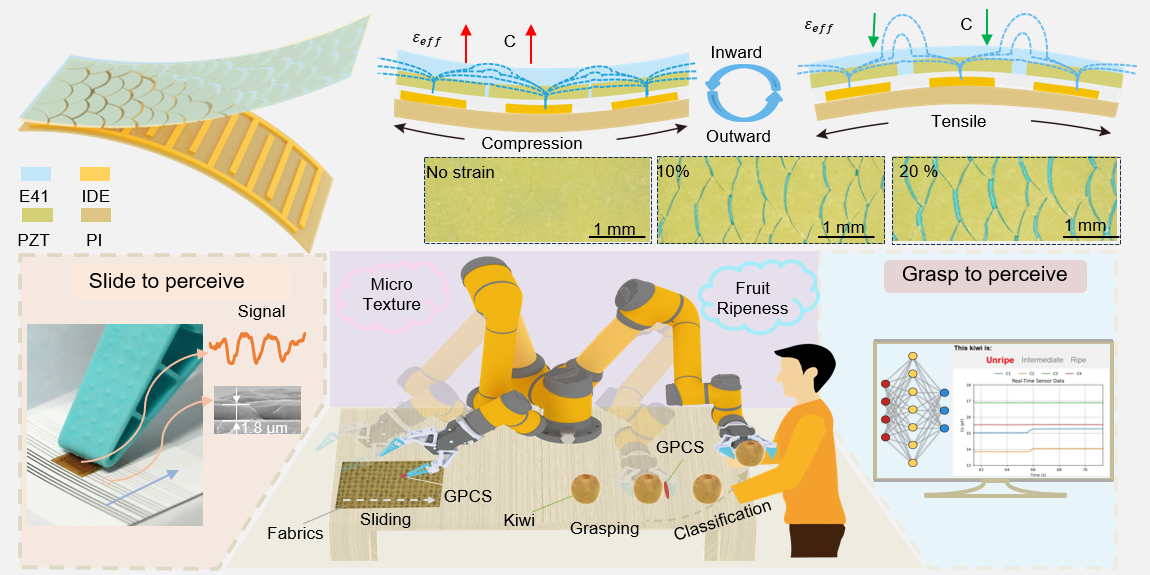
Giant Pizeocapacitive Sensors (GPCS)
This work presents a fish-scale-inspired giant piezocapacitive sensor (GPCS) for human-level tactile perception. It can measure 0.005°bending angle change, with a response time of 0.6 ms. It is capable of detecting micrometer-scale textures (printed tonner line on paper), and robotic kiwi ripeness recognition, automatic sorting, and responsive human–robot interaction.
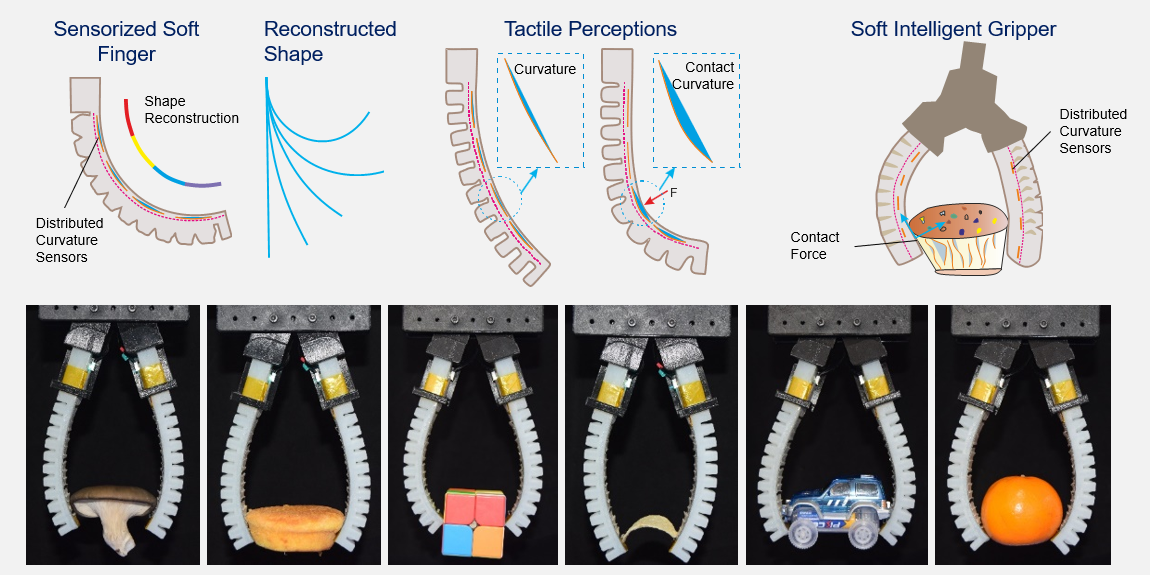
Shape and tactile sensing of soft fingers
This paper presents a distributed local curvature-aware solution for real-time synchronous shape, tactile perception, and force-controlled grasping in soft fingers. This work offers an effective, highly robust, easy-to-implement, perception solution for soft bionic fingers and other fields.
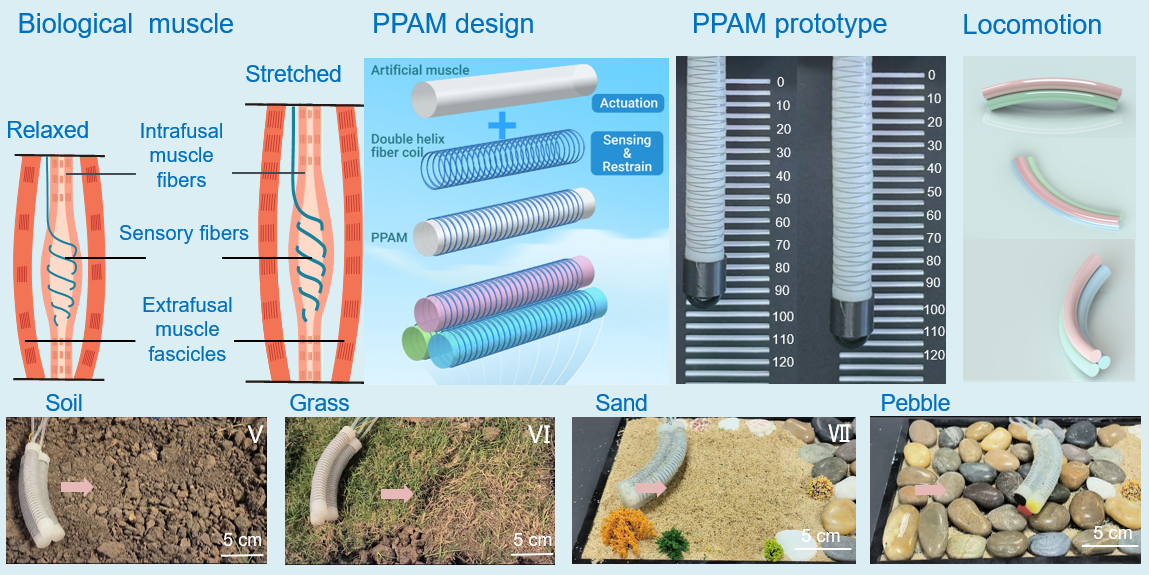
Soft intelligent locomotion robot
Inspired by the structure of muscle spindles, this work presents a perceptive pneumatic artificial muscle (PPAM) via a double-helix conductive fiber-reinforced structure. The PPAM features high resolution (0.01 mm), low hysteresis error (1.02%), and rapid response. Building on a bundle of three PPAMs, a soft intelligent locomotion robot was developed, which can moves at different locomotion modes—crawling, translating, turning, and rolling—along with multi-terrain adaptive mobility and the capacity for perception and decision-making in response to environments.
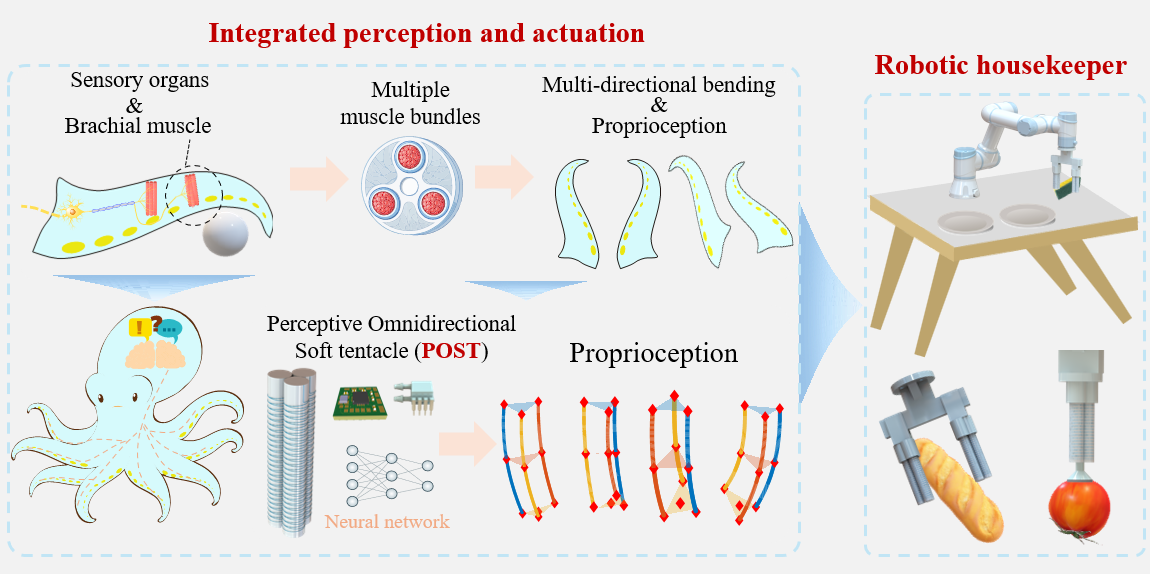
Octopus-inspired Soft Perceptive Tentacle (POST)
We propose an octopus-inspired perceptive omnidirectional soft tentacle that seamlessly integrates sensing and actuation. By embedding internal double-helical conductive coils, it achieves accurate proprioception entirely without external sensors. Utilizing deep learning combined with hybrid inverse control, the system precisely reconstructs 3D deformations and tracks trajectories with sub-mm error. Successfully executing complex tasks like object sorting and coffee preparation, this soft perceptive tentacle offers a novel end-effector solution for intelligent housekeeping robots.
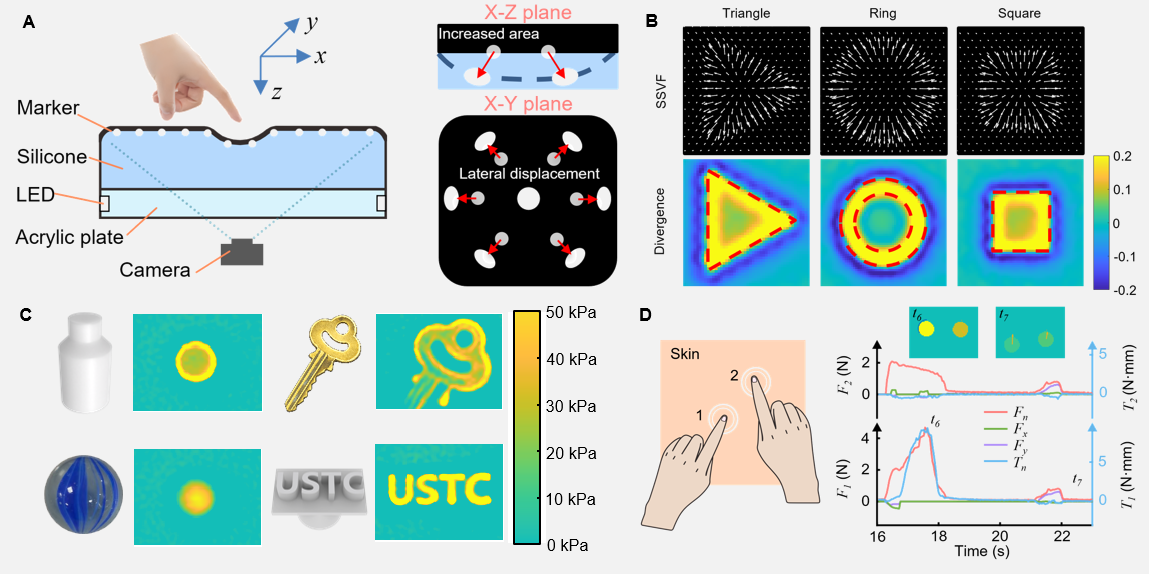
PixelTouch: Vector analysis empowered tactile perception
Traditional vision-based tactile sensors rely on large datasets and high computing costs, limiting practical deployment. This work presents PixelTouch, a vision-based tactile sensing framework that achieves sub-micrometer marker tracking and multimodal tactile perception via vector-analysis, which is training-free, low-computation, and transformative. Furthermore, a wireless miniaturized PixelTouch 2.0 is developed and integrated on robotic grippers to perform delicate chemical operations (using rubber-head pipette, etc.).
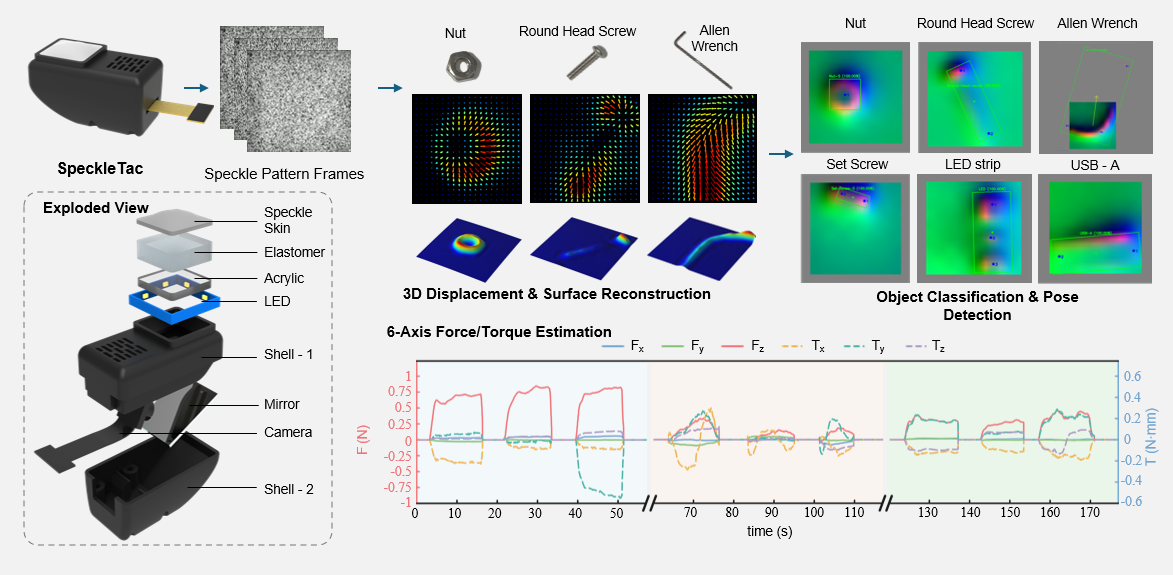
SpeckleTac: a miniature Vision-based tacitle sensor
SpeckleTac, a miniature visuo-tactile sensor with a compact size of 21 × 21 × 37.5 mm³, a sensing area of 15 × 15 mm² and a resolution up to 0.03 mm/pix. It reconstructs 3D surfaces based on speckle optical flow and filtering algorithms, utilizes iFEM to measure six-axis forces and torques, and integrates SPTacNet for object classification and pose estimation. Capable of precisely locating and safely grasping test tubes, the sensor is highly adaptable for robotic dexterous manipulation.
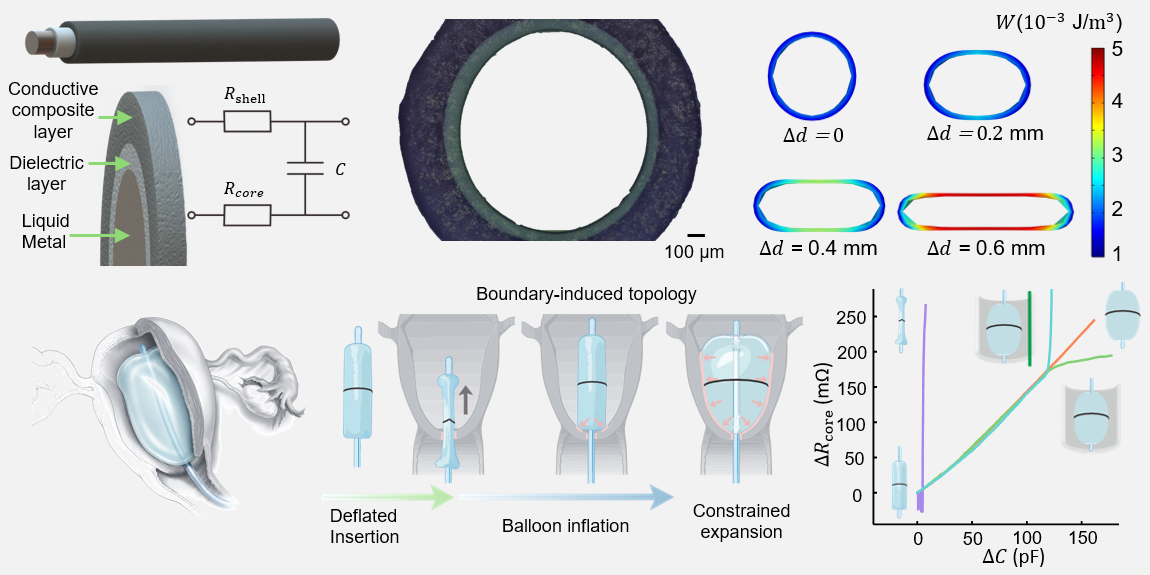
Coaxial fiber for balloon deformation sensing
We propose a stretchable liquid-metal coaxial fiber sensor to monitor and identify complex deformation modes in medical balloons. Composed of an outer CNT-composite shell, an ultrathin dielectric interlayer, and a liquid-metal core, it simultaneously measures resistance and capacitance to precisely distinguish stretching from various compressions. A single fiber can decode balloon expansion, confinement, and local contact states. Featuring excellent anti-interference capabilities, offering an effective sensing solution for medical balloons.
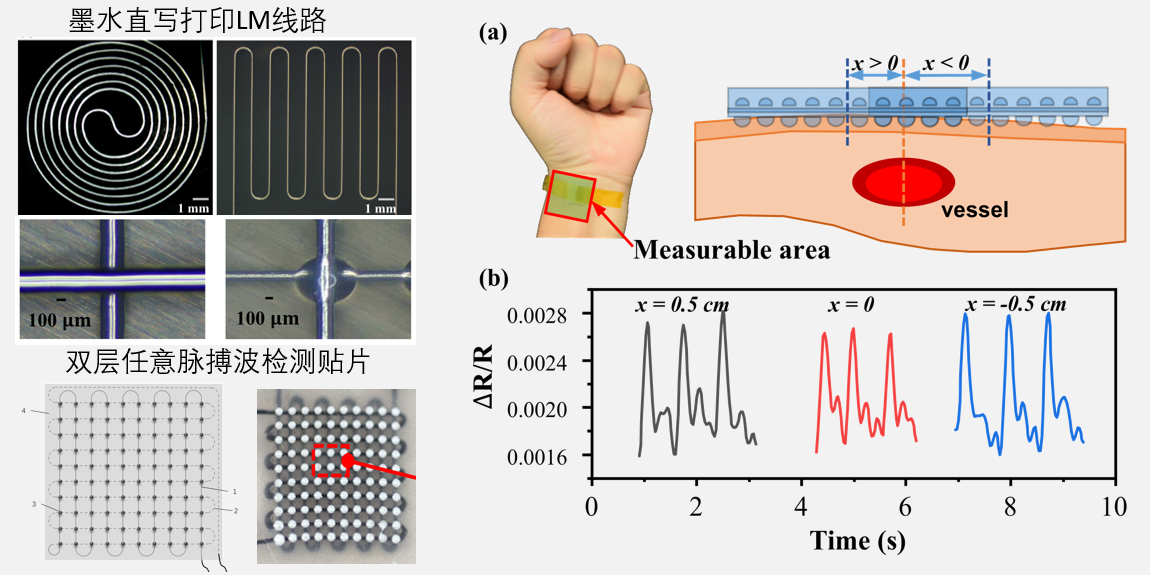
Any-point pulse wave sensing patch
Our ultra-sensitive liquid-metal soft pressure sensor utilizes an innovative micro-bump and cross-channel design to achieve a low detection limit of 0.1 mN. Its unique array architecture offers "position-insensitive," alignment-free monitoring. This allows for the capture of high-quality arterial pressure signals across diverse locations, including fingertips, finger pads, and the radial artery. Remaining highly stable in complex conditions like sweat, this robust device provides a promising solution for precise and continuous healthcare monitoring.
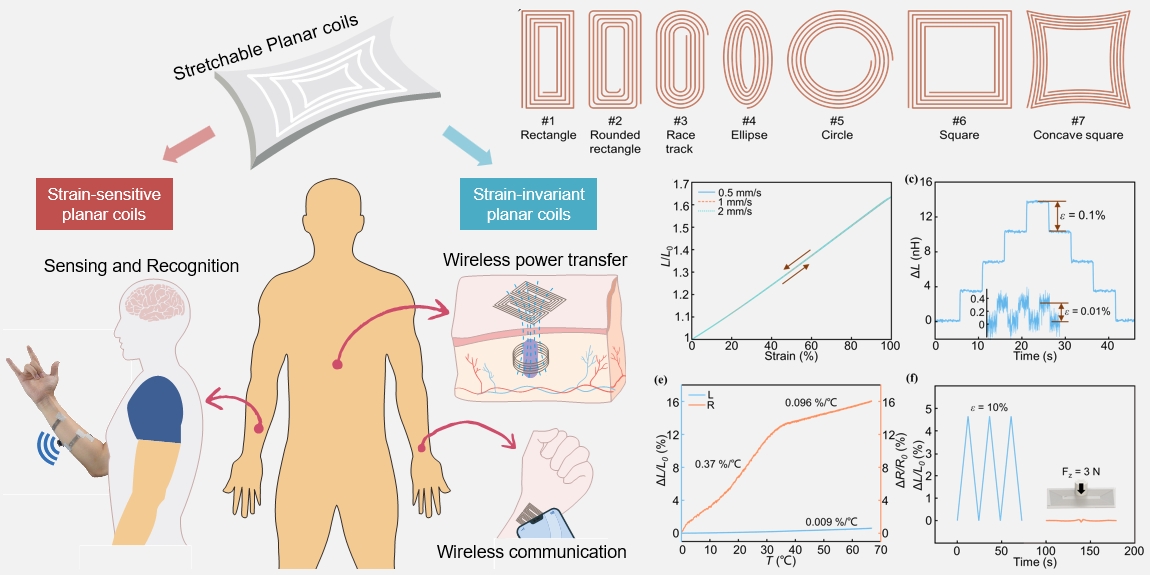
Programming Stretchable Planar coils
We identify that aspect ratio (AR) is the only determining parameter that affect the “inductance-strain” characteristics of stretchable planar. Theoretical analysis, numerical analysis, and experiments confirms the conclusion, and the strain sensitivity of stretchable coils can be adjusted over three orders of magnitude. Stretchable planar coils can be designed as high-sensitivity strain sensors with a detection limit down to 0.01% strain, as well as strain-insensitive antennas, exhibiting a maximum inductance change of less than 1% under 0–50% strain.
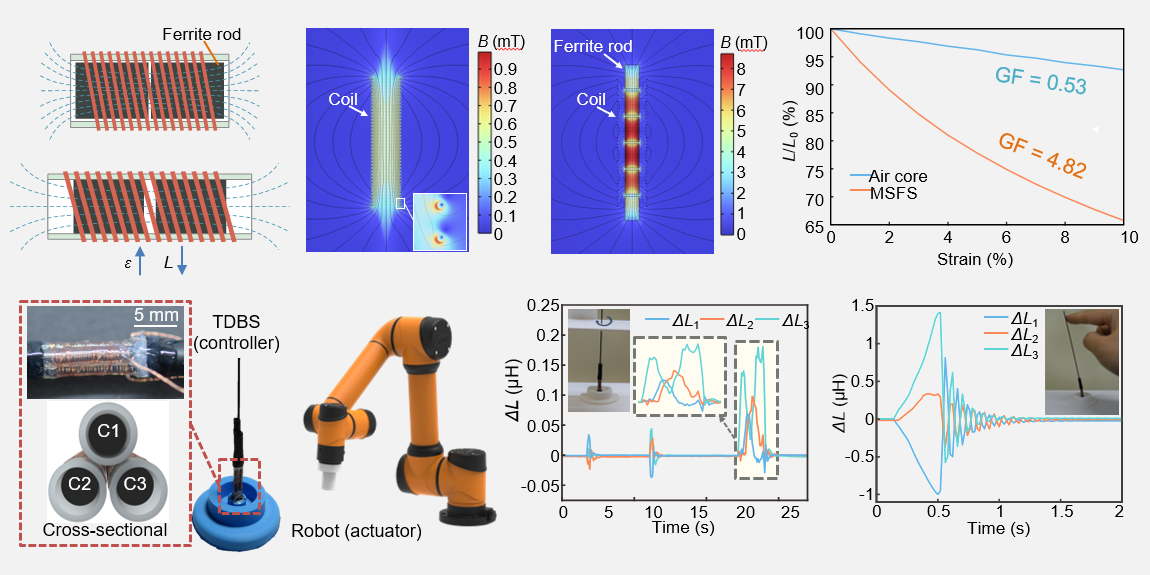
Omnidirectional Bending Sensors
This work proposes a multi-ferromagnetic core enhanced stretchable inductive strain sensor (MSFS), exploiting the magnetic reluctance changes of air-gaps between ferro-cores. A 1 mm diameter helical coil MSFS achieved a ultrahigh strain sensing resolution of 0.001% in a wide range up to 10%. The MSFS has a gauge factor (GF) of 4.82, 9 times of the air core sensor with a GF of 0.53. Building on this, three MSFS were assembled together as a bundle for omnidirectional bending detection, showing promising features in human-machine interactions, as well as in wearables.
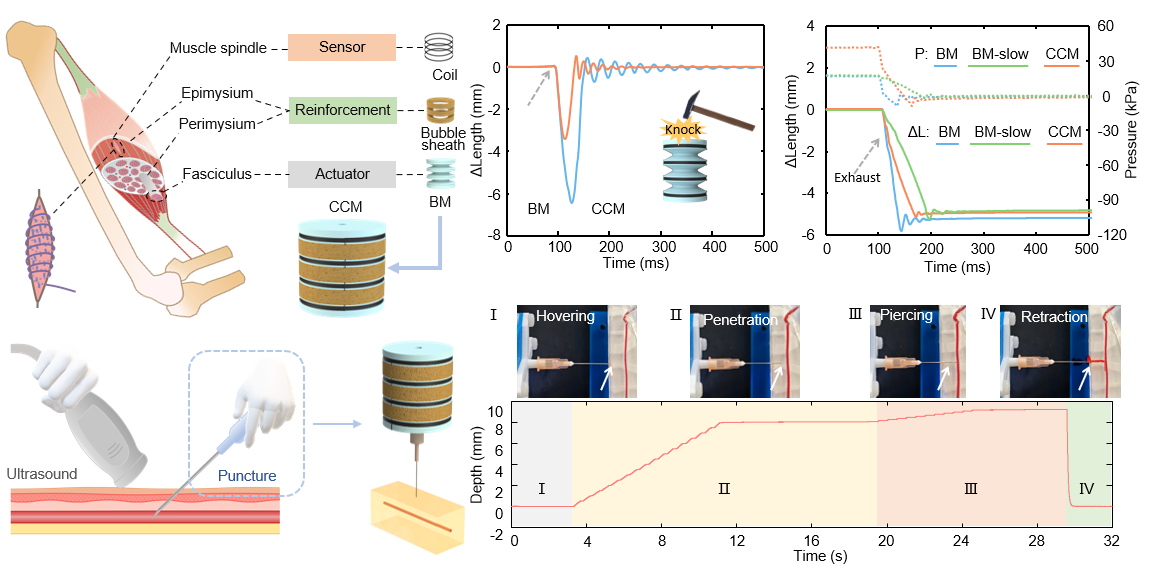
Micrometer-Precision Artificial Muscles
Inspired by the fascia in biological muscle systems, this work presents a composite cylindrical muscle (CCM), which exploit a closed-cell silicone foam sheath on valleys of a bellows-type pneumatic artificial muscle. The CCM achieves a 70% reduction in overshoot and vibration under rapid actuation and external impact, and 5 μm-level precise motion. In addition, we demonstrate that the CCM’s stability and precision in needle insertion applications.
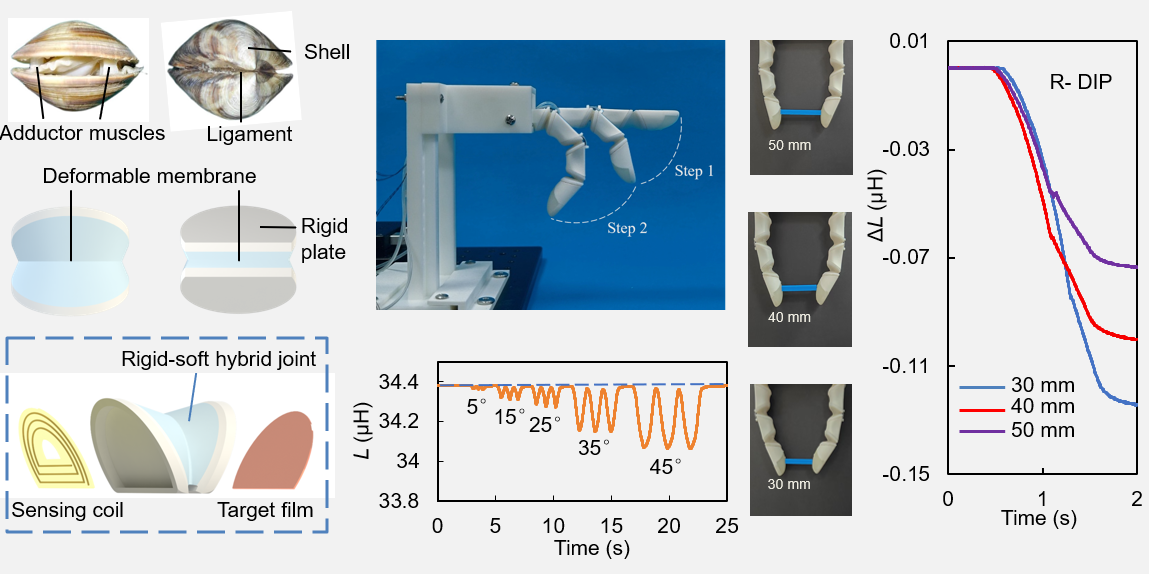
Soft bionic perceptive finger
Inspired by the structure of clams, this paper investigates a biomimetic finger with a rigid-flexible hybrid joint and self-sensing capability. Equipped with seamlessly integrated eddy current sensors, it achieves highly precise angle perception with an accuracy of up to 0.1°. The finger enables real-time proprioception of its own shape and can perceive information such as texture, topography, and dimensions of objects through simple operations like touching and grasping.

CNT network strain sensors
We presented a trace-polymer bonded CNT networks (TP-CNT) which has high conductivity like pure CNT networks, yet extremely good mechanical stability and stretchability like composite materials. The TP-CNT based sensor can be stretched up to 300%, and has a extremely low detection limit of 0.0024%, low hysteresis, linear response. It has proven to be capable of providing accurate monitoring of the expansion of the tracheal tube cuff, and can monitor the the swallowing-respiration coordination.

Inductive multimodal tactile sensor (IMTS)
Building on the characteristics of a inductive coil’s impedance when it is coupled with a conductive target via the eddy-current effect, we presented an inductive multimodal tactile sensor (IMTS) which measure the force and temperature simultaneously by monitoring the coil’s inductance and resistance. With an integrated CNT-based heating unit, the warm-IMTS can recognize the thermal properties of objects by a simple touch like our human fingers, and can also feel the wetness or the air flow.
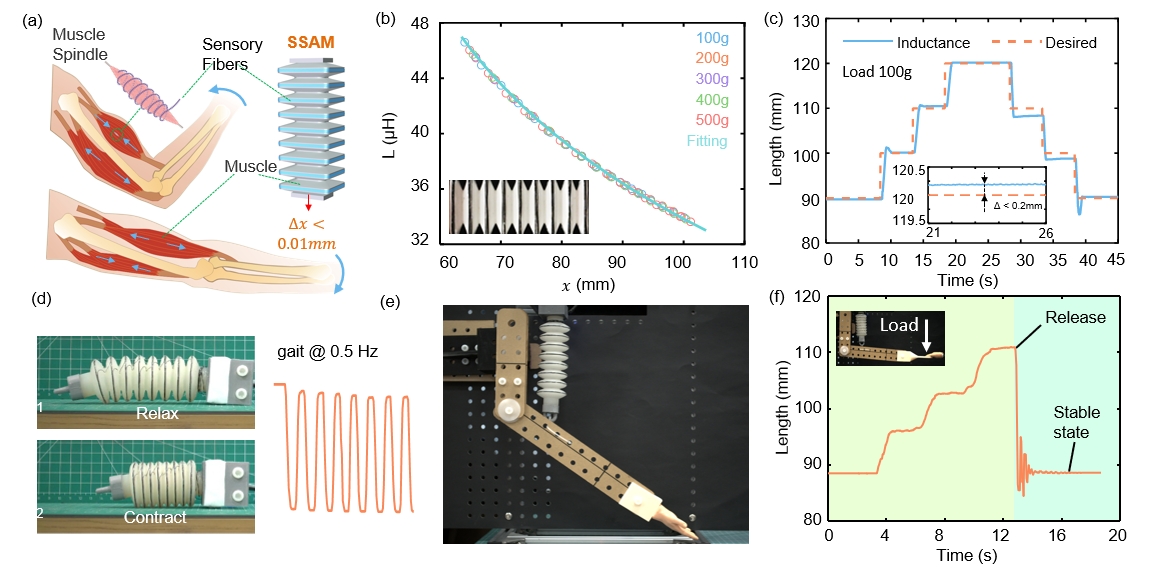
Self-Sensing Artificial Muscle
This work presents a self-sensing artificial muscle (SSAM) that can sense its length change as small as 0.01 mm via a seamlessly integrated multi-segment induction coil. The SSAM provides accurate length information regardless of its loadings, driving pressure, or muscle design, adequate for robust data-driven feedback control. An SSAM-based artificial arm is demonstrated for humanlike spontaneously perception, interaction, and sensing-based positioning.
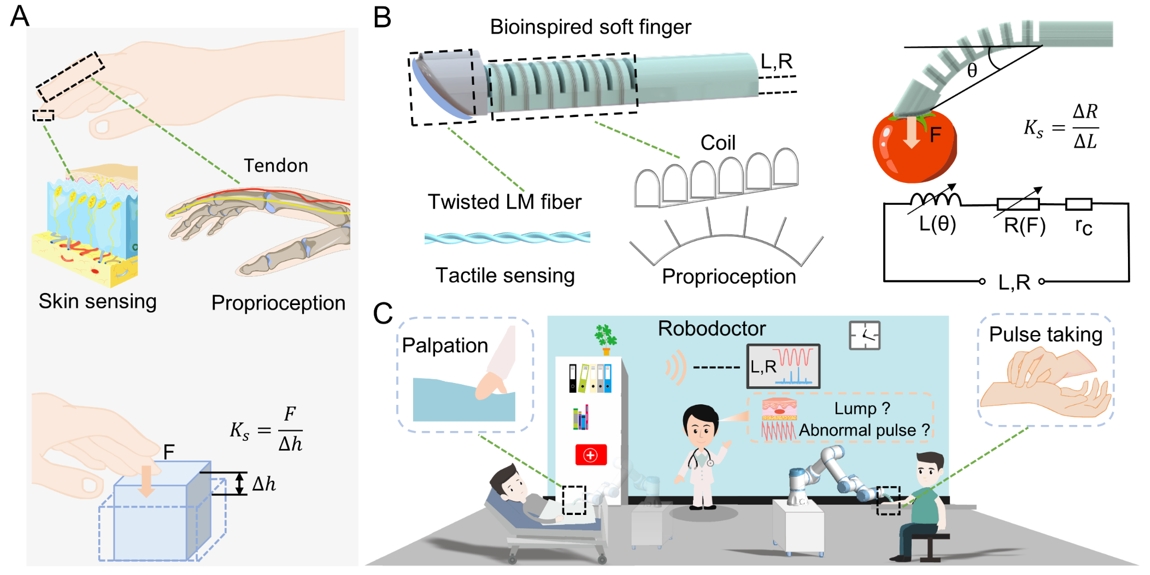
Robotic palpation and pulse-taking
Inspired by the human fingers, this work presents a biomimetic soft finger (BSF) with seamlessly integrated conductive fiber coil, which is capable of monitoring its bending angle and force at the fingertip with a resolution of 0.02° and 0.4 mN, respectively. The fiber coil's inductance decreases with the bending angle and its resistance increases with the force at the twisted LM fiber. The BSF can detect stiffness by a simple touch, and was demonstrated for lump searching and taking pulses like a “Robodoctor”.
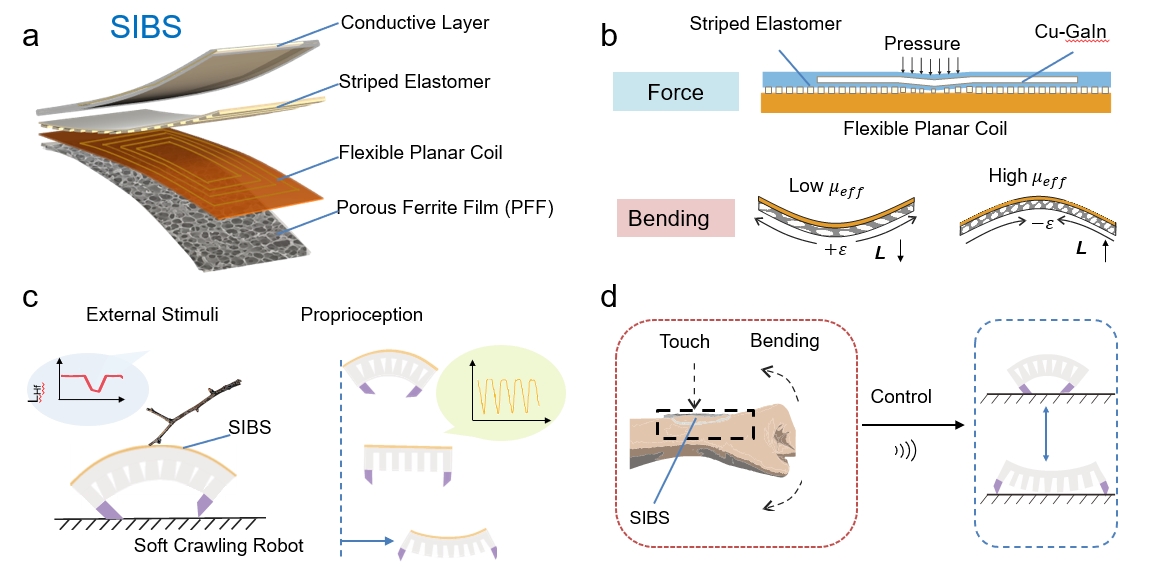
Soft Inductive Bimodal Sensor
This paper presents a soft inductive bimodal sensor (SIBS) with decoupled force and bending sensing by measuring the inductance at two different frequencies. The SIBS exploits the eddy-current effect at high frequency for 1 mN force sensing and the magnetic reluctance effect at medium frequency for bending sensing (0.44°). We demonstrated the SIBS for perception of a soft crawling robot, and as a wearable human-machine interface on the wrist to interactively control a soft locomotion robot.
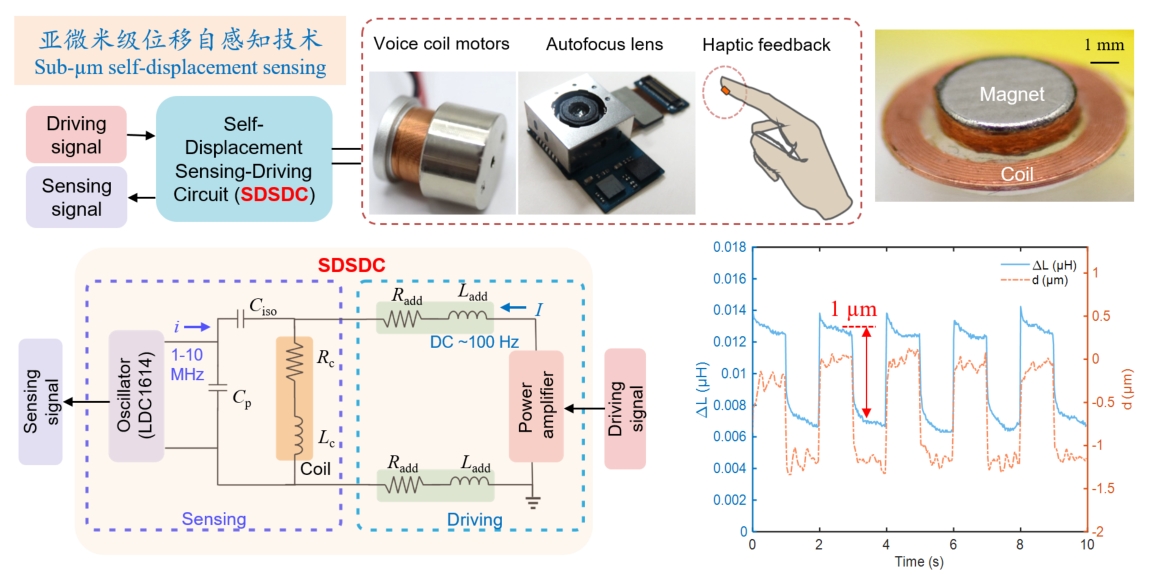
Sub-μm Self-Displacement Sensing
Here, we present a self-displacement sensing solution for SEMAs without requiring additional hardware. A self-displacement sensing and driving circuit (SDSDC) was developed and evaluated, in which low-frequency driving and high-frequency sensing signals can function simultaneously without interfering with each other, with a sensing resolution of 0.03 µm. It shows promising features for applications from auto-focus lens, voice coil motors, haptic feedback devices and metaverse.

Reconfigurable Multiaxis Force Sensor
This paper presents a fully integrated, reconfigurable MFS (RMFS), which utilizes an array of PCB coils to detect the multiaxis displacement/rotation of a metal target at high resolution without mechanical or electrical connections. The RMFS prototype achieved an ultrahigh resolution of 1 mN for triaxial force sensing in a range of 20 N. The RMFS shows promising features to be implemented in diverse applications from robotics, human-machine-interaction, and biomedical systems.
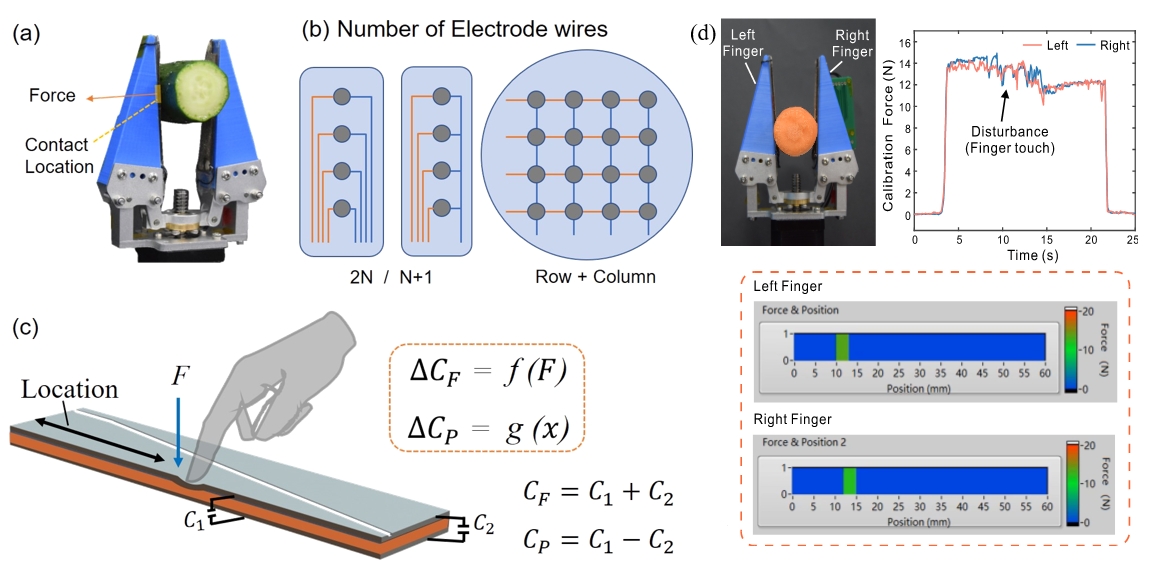
Nonarray soft tactile sensor
In this work, we propose a non-array soft tactile sensor (NA-STS) that utilizes two triangle textile electrodes and a rectangle electrode to form a pair of soft capacitive pressure sensors in a differential configuration along its length. The results show that the NA-STS can detect the force as low as 2.1mN and a maximum error of 2.5 mm for contact location. The NA-STS has a simple structure, high performance and rapid response, immune to proximity effect, and robust for real-word applications.

Printed Inductive coil array sensor
Here we presented a printed induction-based array sensor with only two signal terminals. It identifies the material species of approaching and touching objects and also recognizes the speed and shapes of the objects moving dynamically above the sensor. It is demonstrated that a finger-like array sensor with two terminals could provide a simple and reliable structural design for the new robotic applications of material recognition and stimuli position detection.

Split wearable angle sensor
In this work, we propose a film-like split angle sensor (FSAS) which operates through AC magnetic field coupling between a soft planar coil and a ferromagnetic or conductive target film. The FSAS has a split configuration, overcoming the movement impairment problem presented by the strain sensing approach. It was demonstrated for angle sensing and external force detection of a laptop lid, wearable angle monitoring of elbow, and perception of a pneumatic driven origami robot.
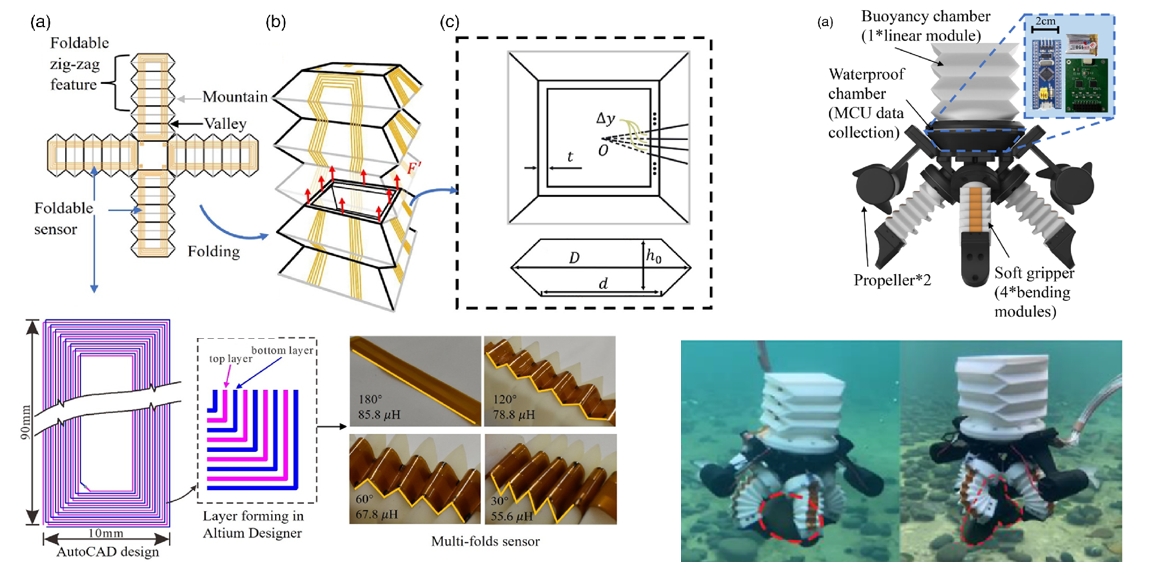
Perception of an Origami Robot
A reconfigurable and proprioceptive soft origami module is presented, where two actuation modes (i.e., extension and bending) are realized. Multimodal perception is enabled using a novel foldable self-inductance sensor. An intelligent gripper is capable of grasping mode adjustment, grasping force measurement, and the grasping target’s size measurement. Moreover, an intelligent jellyfish is presented, with buoyancy adjustment and underwater grasping capabilities.
USTC
Other Links
Contact Us
Location: Room 425, Academic Building 3,
USTC High-Tech Park, USTC
Address: Fuxing Rd. 100, Hefei,
E-mail: wangh@ustc.edu.cn