我们主要从事传感器及检测技术的研究,致力于发展“结构工艺简单,性能突出,可无缝集成”的柔性传感器和智能感知系统,
并积极探索其在智能机器人、可穿戴系统和医疗健康监测等领域的前沿应用。
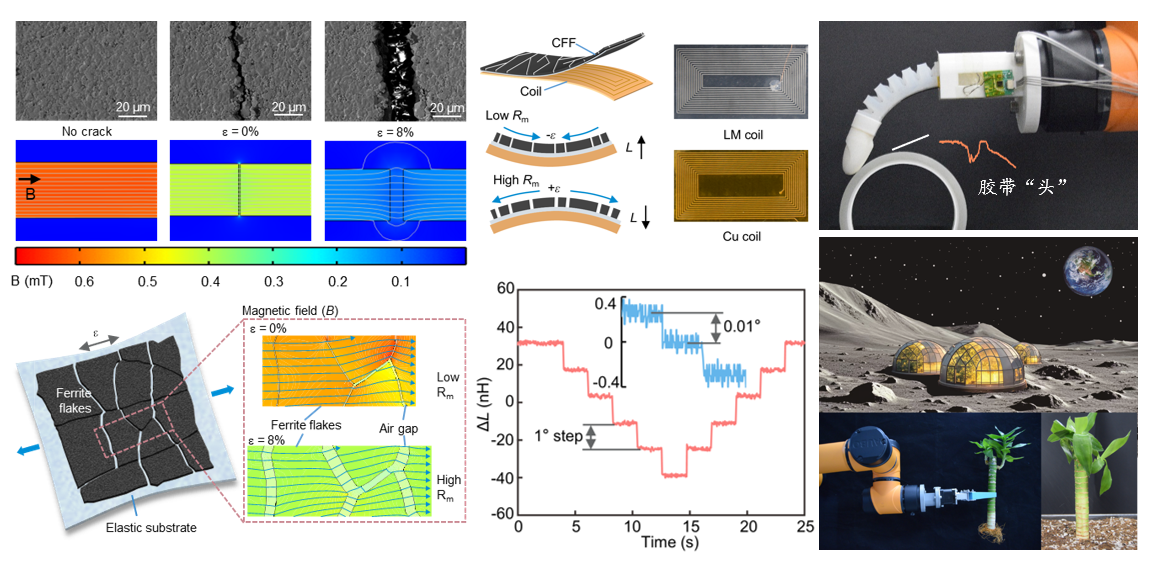
磁性裂纹电感传感器
本文提出了一种基于磁性薄膜贯穿裂纹的新一代电感式双向曲率柔性传感器,其利用一个平面线圈检测裂纹铁氧提膜的磁阻变化,该传感器可在-200°至327°的范围内检测低至0.01°的微小弯曲变形,并具有响应速度快、无迟滞、长期稳定性高,制造一致性好等特性,并在汽车多次碾压和破损等情况下保持性能不变,为真实世界中的机器人精准感知开辟了新路径。
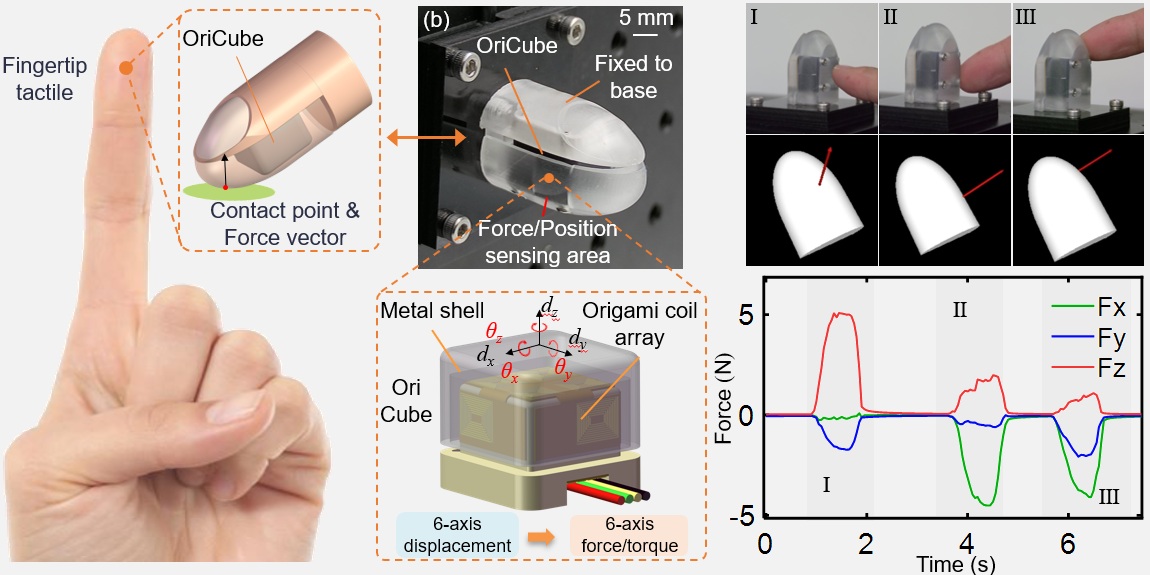
OriCube: 指尖尺寸六维力传感器
本文提出一种折纸结构启发的指尖大小电感式六轴力/力矩传感器。它利用3D折叠线圈阵列通过涡流耦合检测金属壳的位移和旋转,从而实现自解耦的六轴力/力矩测量。该传感器(包括集成的信号调理电路)尺寸仅为 14x14x12 mm3,重量4g,量程23N,分辨率3 mN,功耗46 mW。我们还展示了利用该传感器实现指尖曲面上的实时触觉感知(接触点和力向量)。
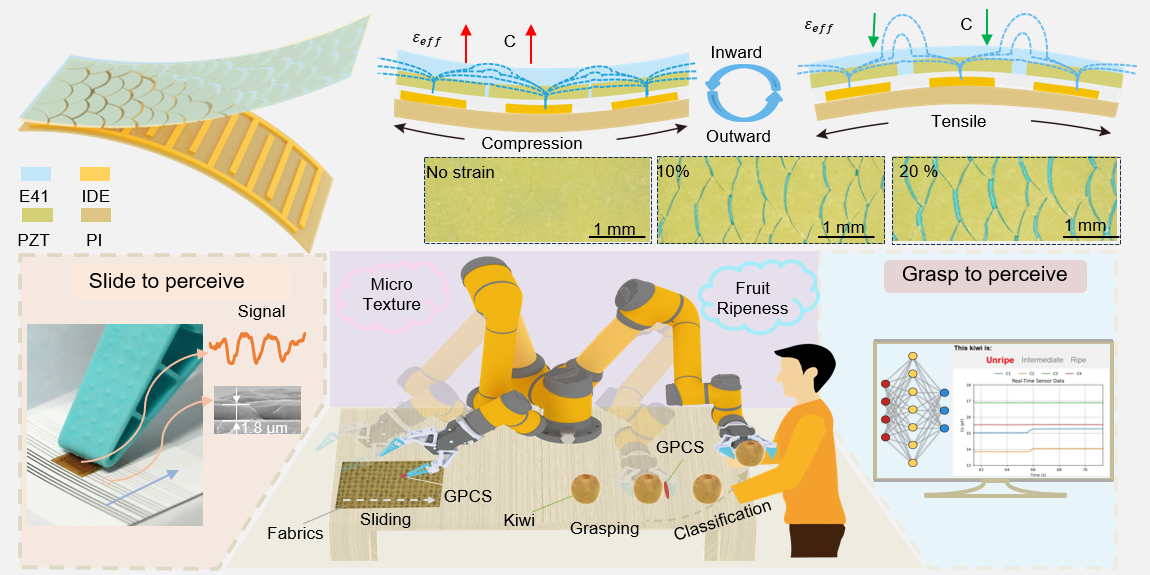
巨压容效应触觉传感器
本文提出了一种仿鱼鳞电场调控的巨压容传感器(GPCS),可检测低至0.005°的微小变形,响应速度0.6 ms,长期稳定性高(10万次循环)。该传感器可实现类人高精度触觉感知,织物纹理以及打印在纸张上的线条墨水的高度(µm),并在机器人抓取过程中实现猕猴桃成熟度识别与自动分拣。
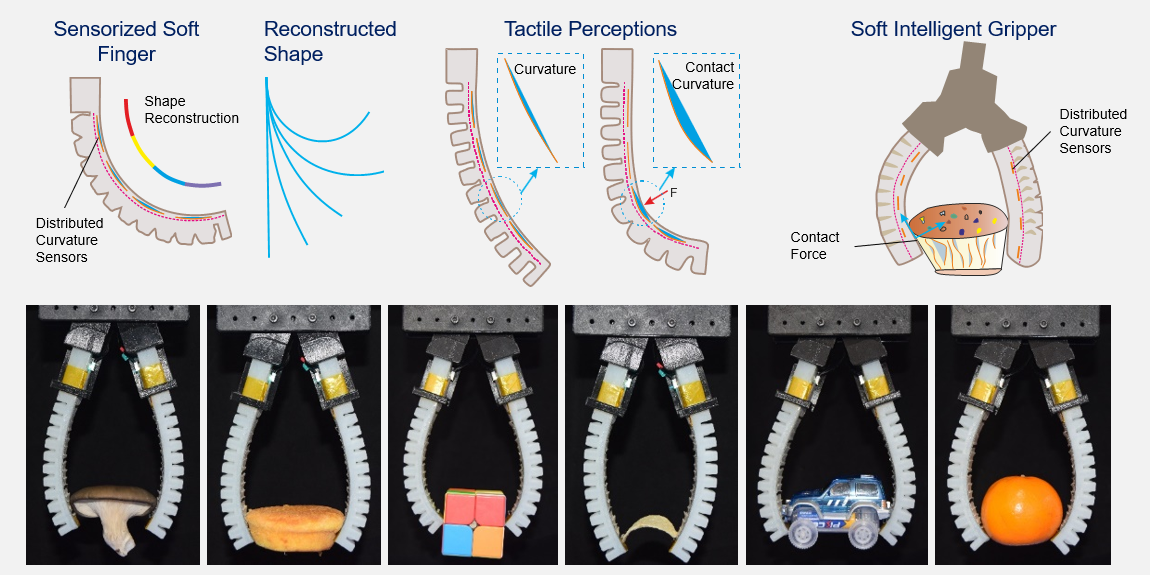
柔性手指本体形状与触觉感知
本文提出了一种基于分布式局部曲率感知的解决方案,用于仿生手指实时同步实现形状、触觉感知以及力控抓取。这项工作为软体仿生手指及其他领域提供了一种高鲁棒性,简单有效的本体和触觉感知新思路。
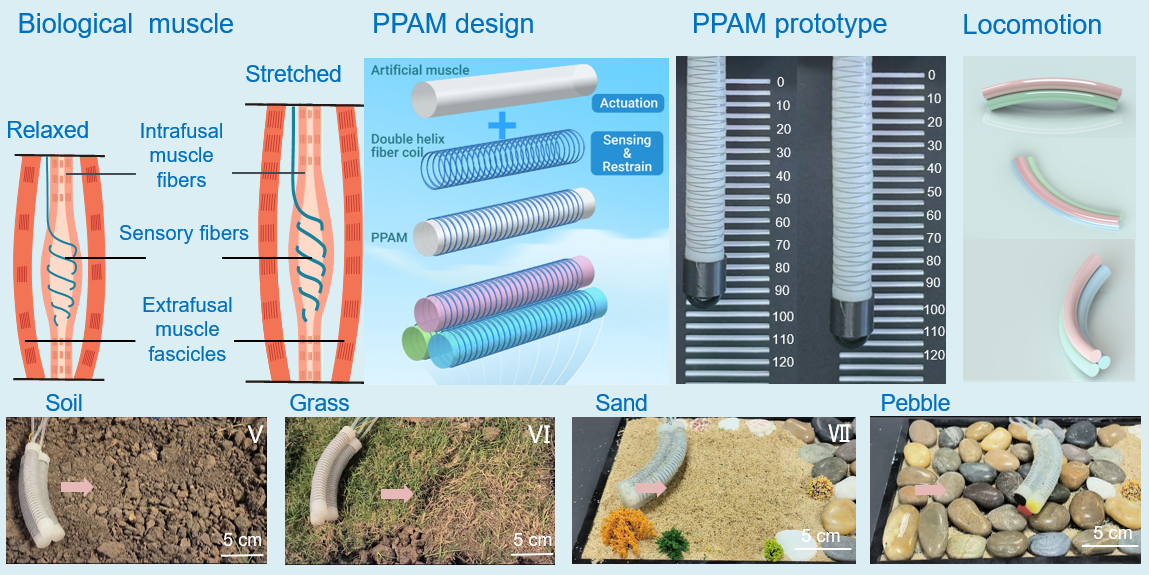
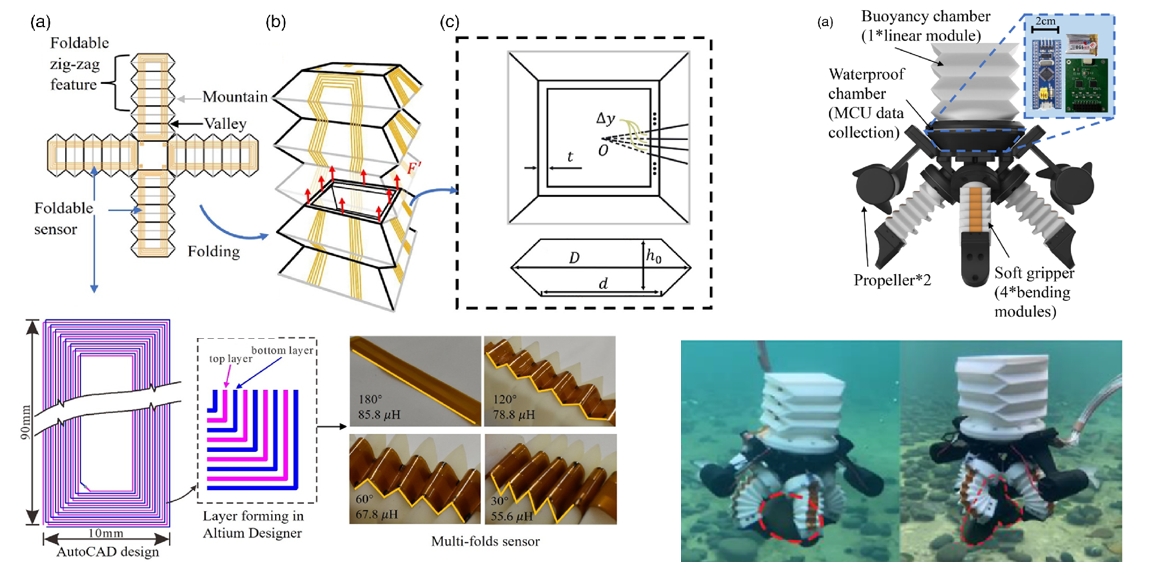
地形自适应移动机器人
受人体肌肉中肌梭结构的启发,本文提出了一种基于双螺旋导电纤维增强结构的气动人工肌肉PPAM。PPAM具有高分辨率(0.01 mm),低迟滞误差(1.02 %),响应速度快等特点。我们基于三组PPAM的模块化组合,构建了多模态仿生移动机器人,实现了爬行、平动、转向、翻滚四种运动模式,以及多地形自适应移动与外界刺激感知决策能力。
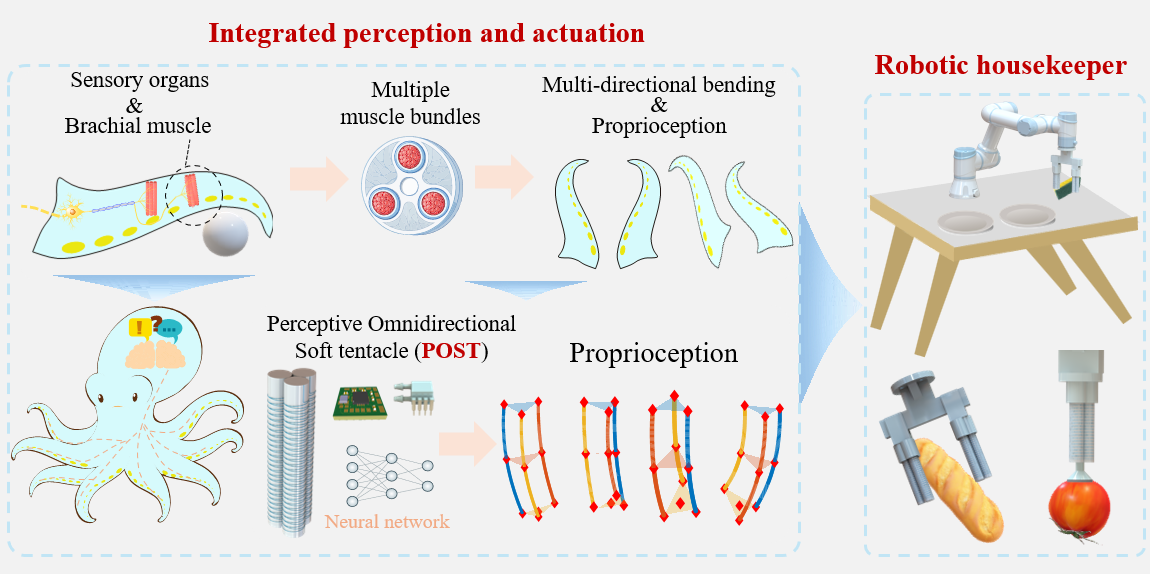
仿章鱼自感知柔性触手
我们提出了一种仿章鱼触手的感知全向柔性触手,实现了感知与驱动的无缝集成。其内部嵌入双螺旋导电线圈,无需外部传感器即可通过实现精准的连续本体感知。结合深度学习与混合逆向控制,系统可精准重建三维形状,并实现极低误差的轨迹跟踪。该柔性自感知触手可执行物品分类、制作咖啡等复杂任务,为智能家政机器人等场景的末端执行器提供了一种新思路。
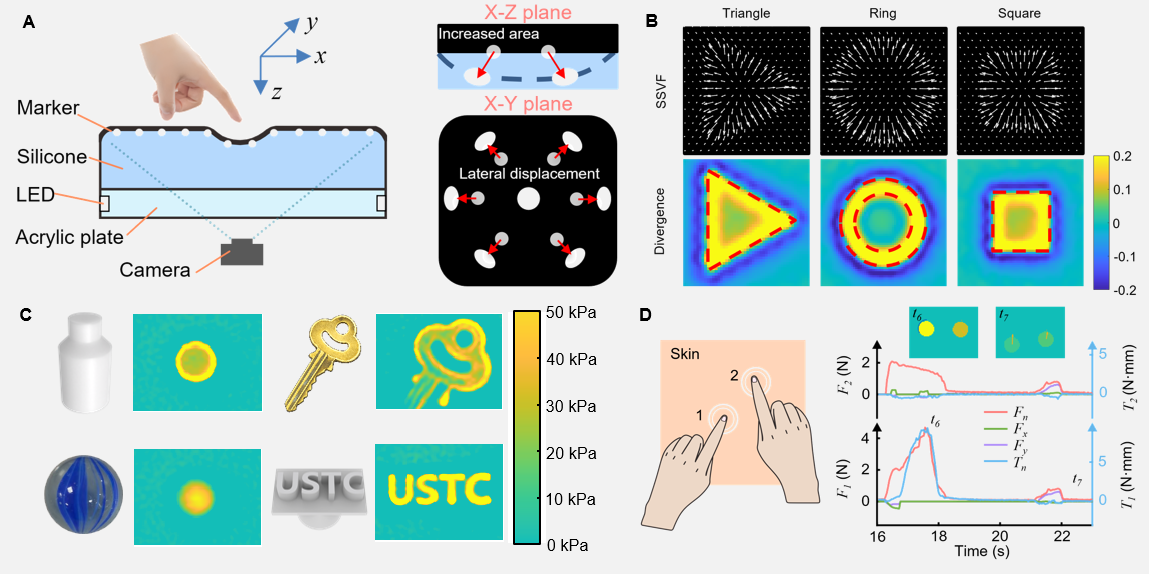
PixelTouch: 矢量分析多模态触觉感知
针对传统视觉触觉传感器依赖海量数据与高算力的问题,本文提出 PixelTouch,利用具备亚微米级追踪精度的超高对比度柔性皮肤与矢量分析运算,实现无需训练、小计算量的接触边缘、压力分布及解耦多轴力感知;小型化PixelTouch 2.0成功应用于机器人精细操作化学工具(比如橡胶滴管)以及安全人机交互。
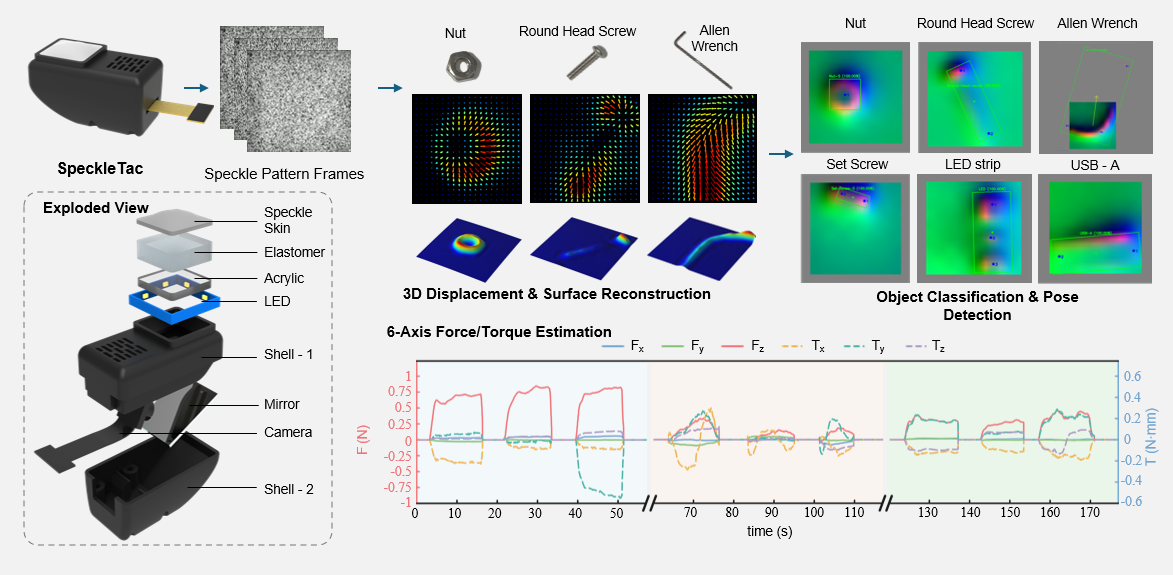
SpeckleTac: 随机散斑小型化视触觉
本文提出微型视触觉传感器SpeckleTac,传感器尺寸仅21×21×37.5mm³,感知面积15×15mm²,分辨率达0.03mm/pix。它基于散斑光流与滤波算法重建三维表面,利用iFEM测量六轴力与力矩,并结合SPTacNet实现物体分类与姿态估计,能精准定位并安全抓取试管,高度适配机器人精细操作。
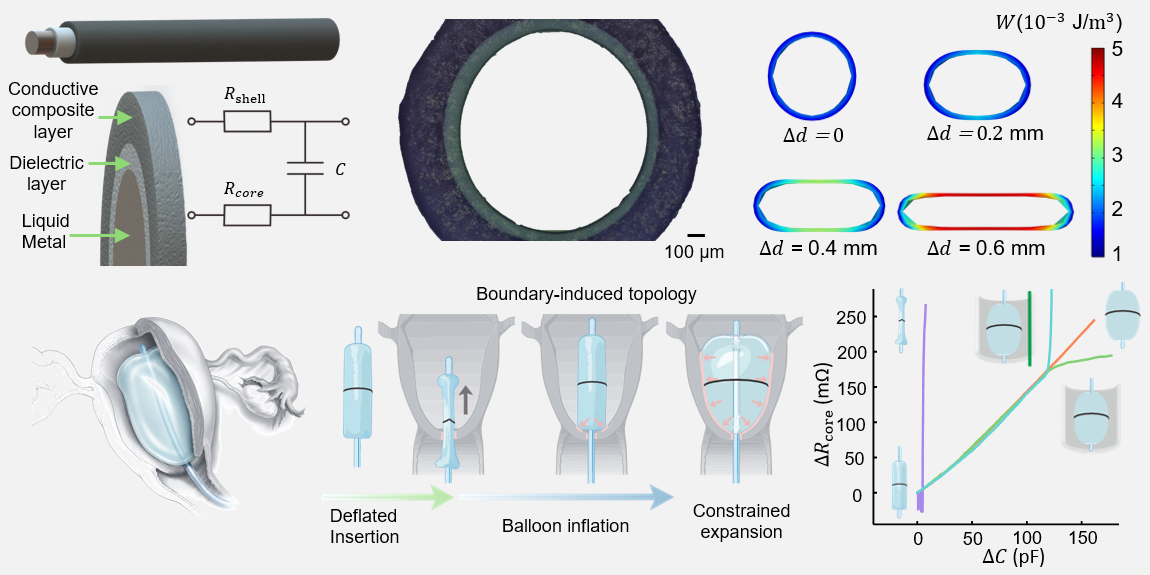
同轴纤维球囊形变传感器
我们提出了一种可拉伸液态金属同轴纤维传感器,用于医疗球囊的复杂变形模态监测和识别。该同轴纤维由外层CNT复合导电材料、中间超薄介电层以及液态金属内芯构成。通过同时测量其电阻与电容信号,可精准区分拉伸与各类压缩等复杂形变模式。单根纤维可解码球囊膨胀、受限与局部接触状态,具备优异的抗干扰能力,为医疗球囊的感知提供了一种有效解决方案。
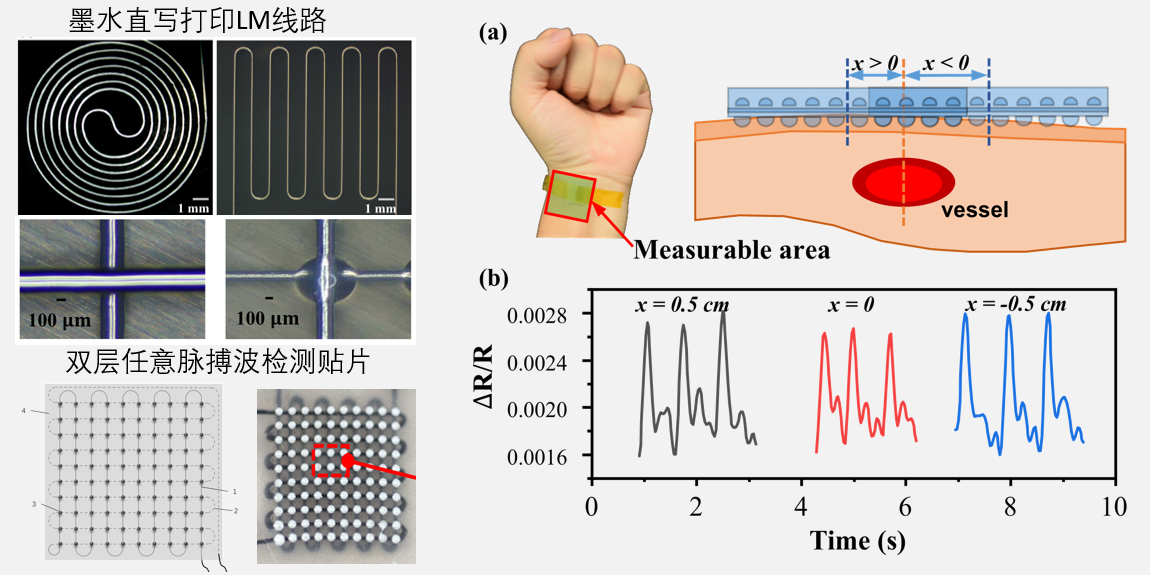
任意位置脉搏波传感贴
超高灵敏度液态金属柔性压力传感器采用创新的微凸起与交叉通道设计,检测限低至0.1 mN。其独创的阵列架构实现了“位置不敏感”特性,可免对准实现精准脉搏波监测,在任意位置(指尖、指腹、桡动脉)实现高质量动脉压力波信号检测,并在汗液等复杂环境中依然稳定工作,为个人连续健康监测提供了一种新方案。
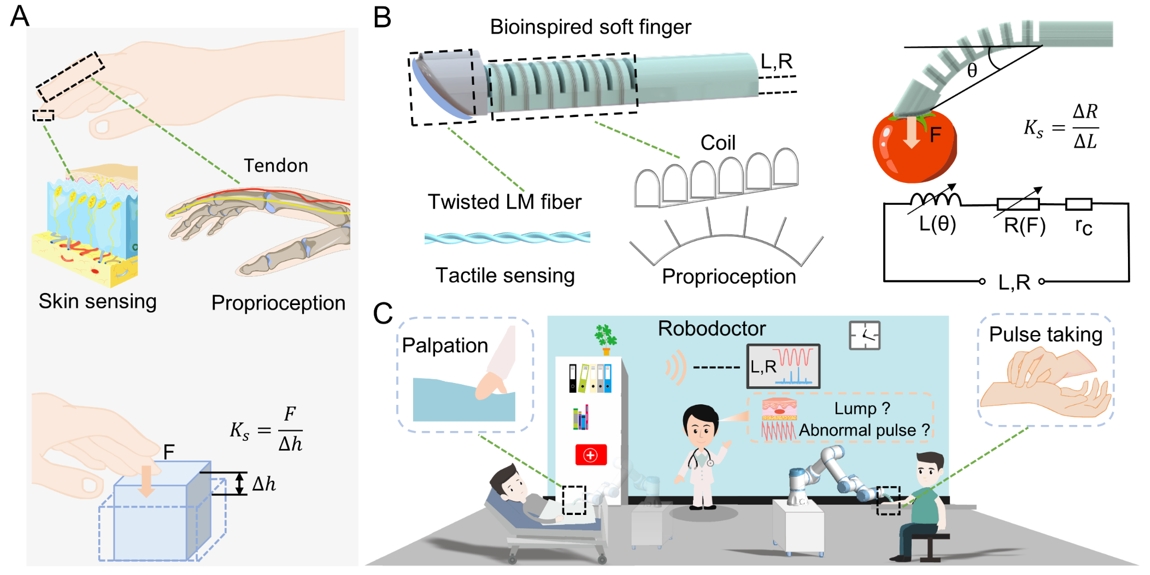
仿生手"触诊-把脉"
受人手的启发,本文提出了一种仿生的软手指,通过无缝集成的导电纤维线圈实现自解耦弯曲和力传感,最高角度分辨率和力分辨率分别为0.02° 和0.4 mN。其能够通过简单的触摸来实现物体柔软度检测,并用于肿块检查和脉搏采集,凸显了其作为机器人医生的潜力。
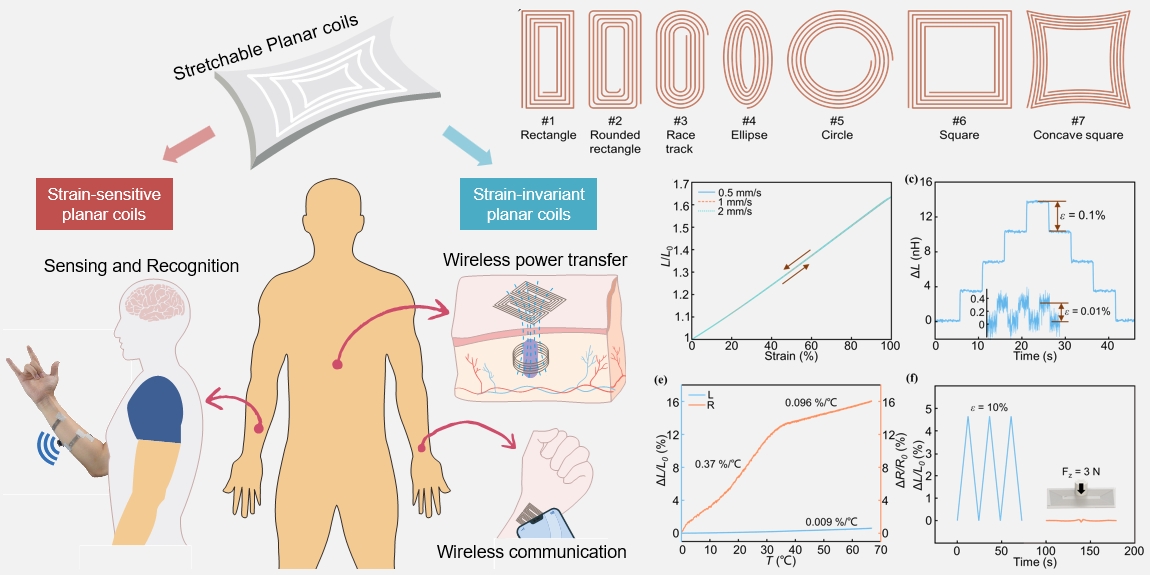
平面线圈的编程设计
我们发现长宽比是唯一决定可拉伸平面线圈的“电感-应变”特性的设计参数。理论分析、数值计算和实验均验证了该结论,实现了跨3个数量级的线圈应变灵敏度调控。平面线圈可以设计成高应变灵敏度传感器,其检测限低至 0.01% 应变,且高线性响应、无滞后且对温度和压力不敏感;也可以设计成高频率稳定性天线,在0到50%应变范围内的最大电感变化小于 1%,能够实现无线电力传输和NFC通信。
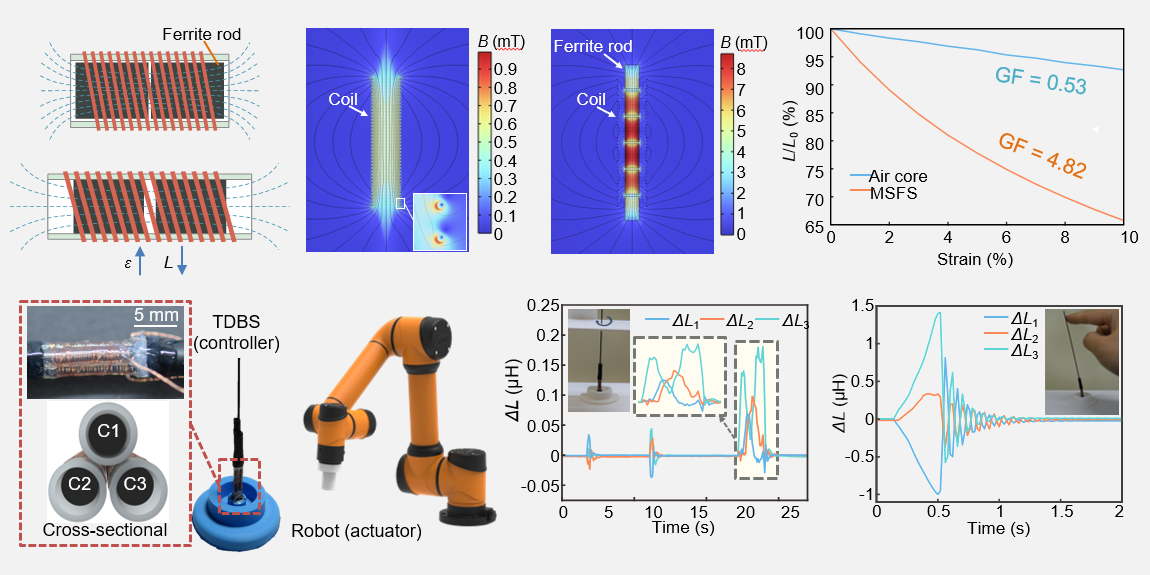
超灵敏全向弯曲传感器
本文提出了一种基于多段铁氧体芯棒磁阻调制的微型螺线管柔性应变传感器MFS,应变测量范围可大10%以上,分辨率低至0.001%。MSFS的应变因子达到了4.82为空气心(0.53)的9倍。在此基础上,设计实现一种基于三段MSFS并联的全向弯曲传感器,可以实现角度和方向的高灵敏度传感,在机械臂遥操作、人机交互、可穿戴运动监测等领域具有良好的应用前景。
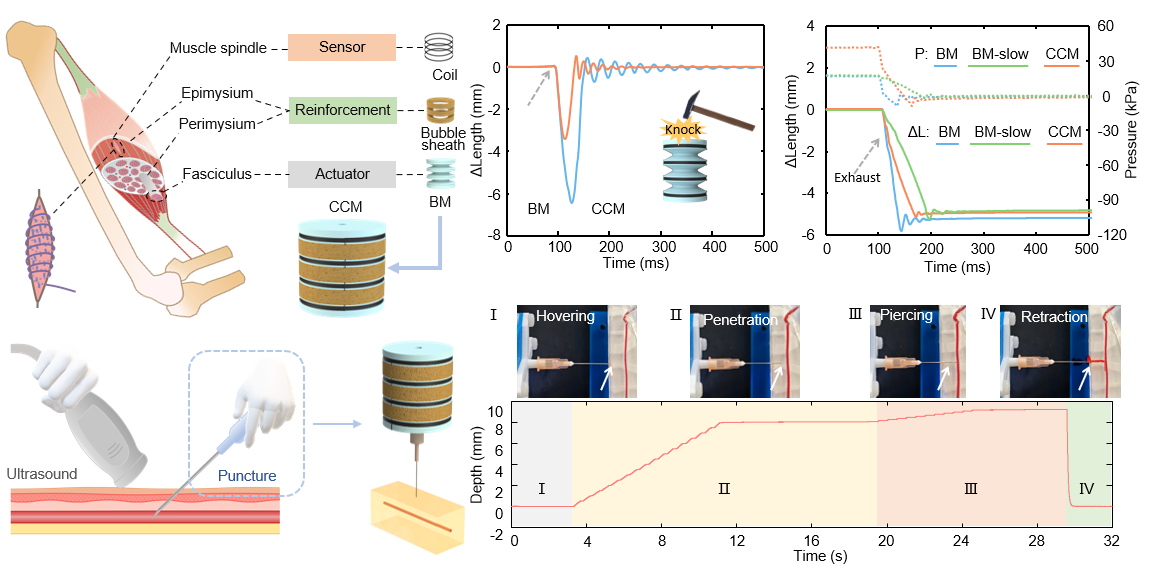
微米精度人工肌肉
受肌肉筋膜结构启发,本文提出了一种微囊泡护套增强的自感知复合材料人工肌肉,其输出力和横向刚度得到了大幅度的提升,在快速驱动及外部冲击条件下的超调与振动较传统波纹管肌肉降低约70%。该肌肉可实现低至5 μm的驱动精度,我们展示了其在与微血管穿刺应用中的潜在价值。
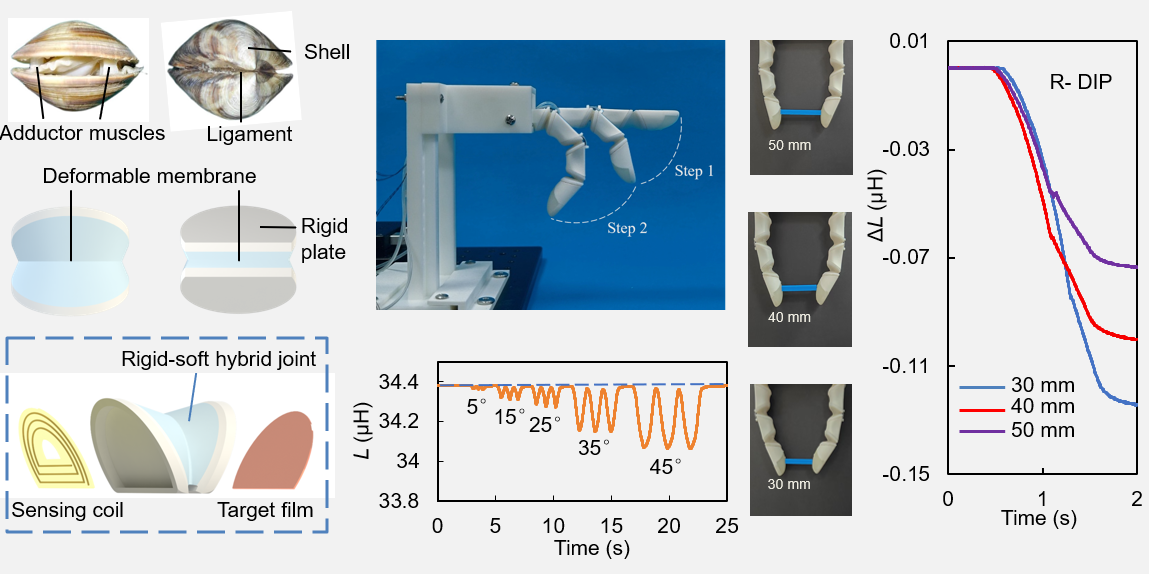
仿生刚柔混合自感知手指
本文受贝壳结构启发研究了一种具有刚柔混合关节的自感知仿生手指,通过无缝集成的电涡流式传感器能够实现精准到0.1°的角度感知。能够实现手指形态的实时本体感知,并通过触摸抓取等简单操作,感知物体的纹理、形貌、尺寸等信息。

CNT网络应变传感器
我们提出了一种基于微量聚合物键合的碳纳米管网络TP-CNT,其具有纯碳纳米管的高导电性和复合材料的良好拉伸性及机械稳定性。基于TP-CNT的应变传感器可以测量高达300%的应变,并在0-100%范围内具有低至0.0024%的分辨率,低迟滞、线性响应等特点,可用于插管球囊膨胀的精确检测和吞咽障碍监测。

电感多模态触觉传感
基于电涡流效应阻抗耦合特点,本文提出了一种通过同时测量单个线圈的电阻和电感而实现对温度和压力同时测量的电感式多模态触觉传感器IMTS。集成加热单元的warm-IMTS,可以实现类似人手指通过触摸物体表面识别材料属性、湿度、风速等。
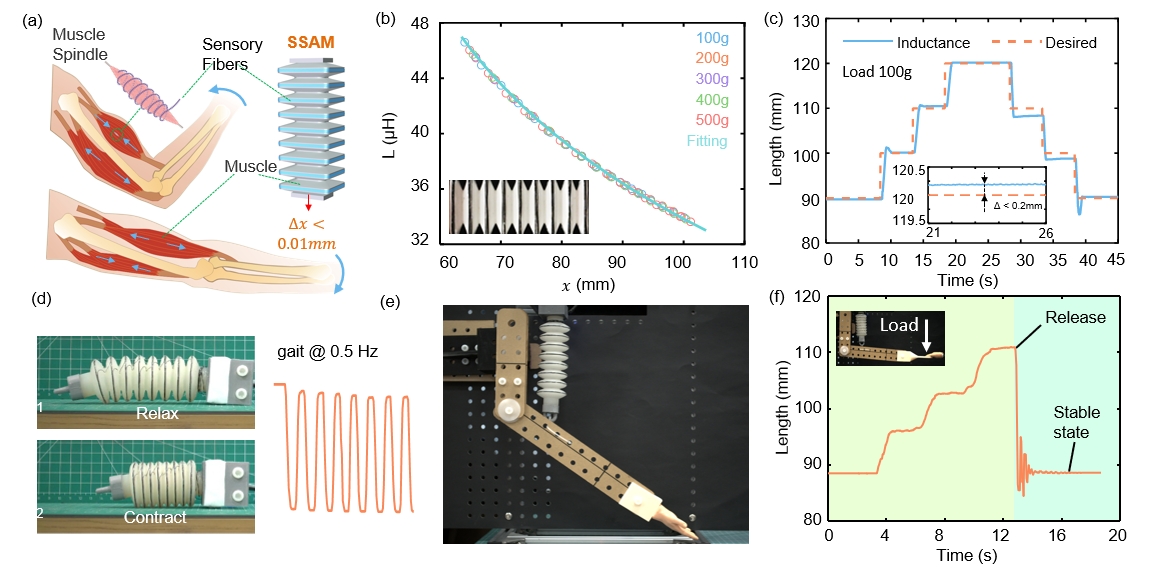
自感知人工肌肉
受肌肉肌梭启发,本文提出的自感知人工肌肉(SSAM)可以通过本体集成的多段感应线圈感知其长度变化(<0.01 mm),该长度感知不受载荷、驱动压力或肌肉形状影响。基于SSAM的仿生蚯蚓和仿生手臂具备类生物的交互响应能力。
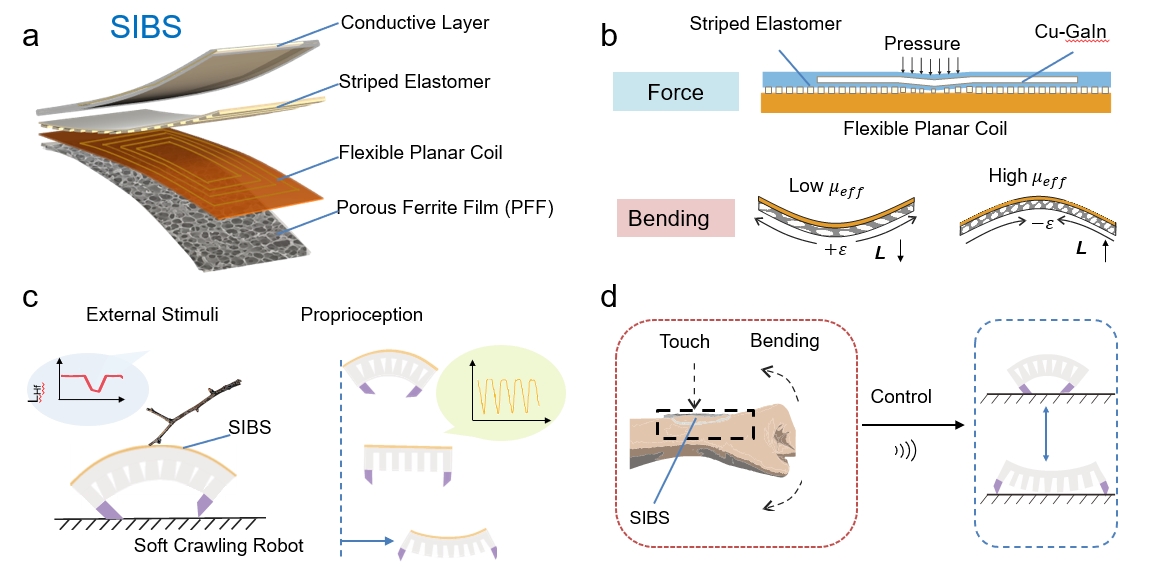
双模态电感式传感器
本文提出了一种通过频率复用实现的双模态传感器,分别利用电涡流效应实现高灵敏度压力感知(1mN分辨率)和磁阻效应实现高分辨率弯曲传感(0.44°),并演示了其在移动软体机器人感知和可穿戴人机交互界面方面的应用。
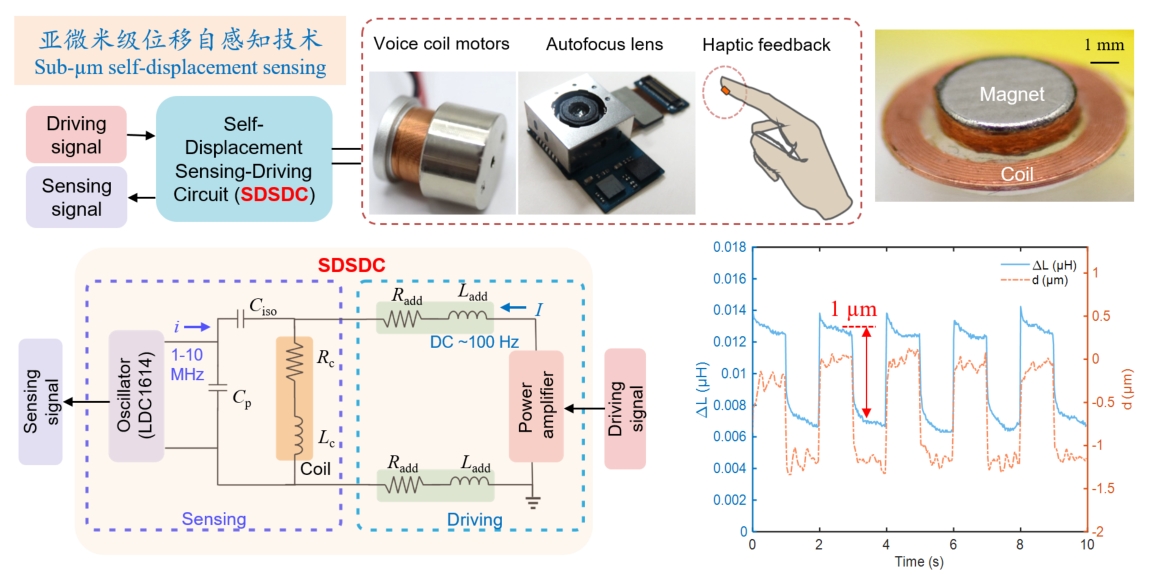
亚微米分辨率位移自感知
本文提出了一种针对小型化电磁致动器的位移自感知技术,基于电涡流效应的频率特性设计了一种驱动-传感一体化电路SDSDC,实现了0.03µm的位移自感知分辨率,在自动对焦马达、音圈电机、元宇宙等领域都具有广泛的应用前景。

可重构电感式多维力传感器
本文提出了一种基于电感位移测量的可重构多维力传感器,利用线圈阵列实现对导电目标靶的多维位移/旋转的测量,并借助弹性体实现多维力/力矩的解耦。同时,该传感器通过简单的重构能够实现从测量xyz三轴力到测量xy轴力矩,z轴力的功能重构。
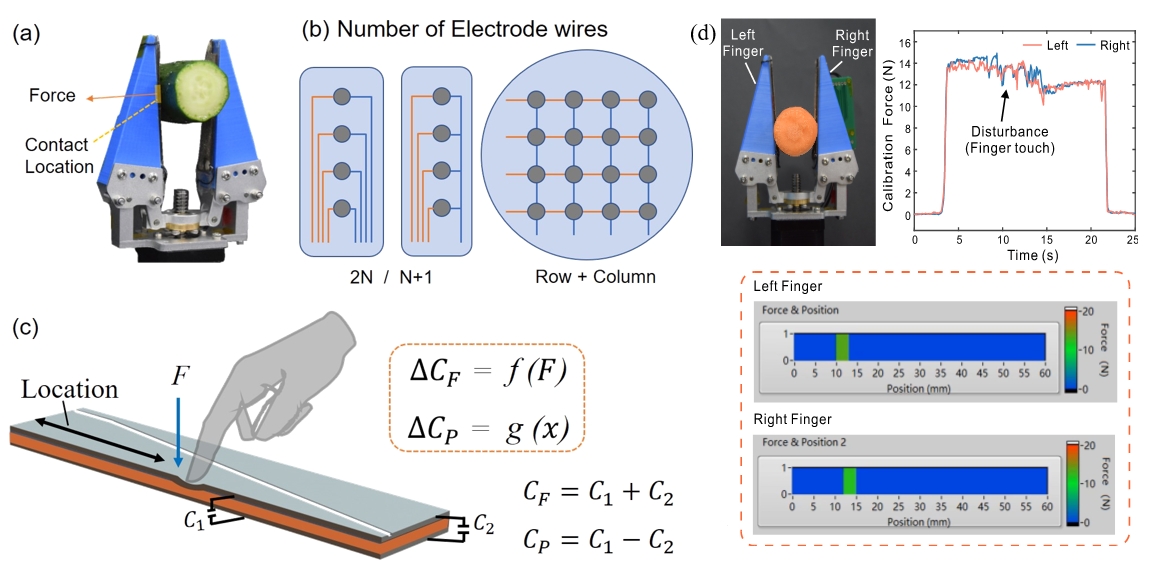
非阵列式柔性电容触觉
本文提出了一种基于差分三电极结构“电容对”的方案,只利用两个电容式传感器实现了压力和位置的同时感知,可为智能、安全、高效的物体抓取和操控提供感知信息,为实现可在真实场景中应用的触觉感知提供一种新方案。