我们致力于探索新兴传感机理和形式,发展“结构工艺简单,性能突出,可无缝集成”的柔性传感器和智能感知系统,
并积极探索其在智能机器人、可穿戴系统、医疗健康和先进制造等领域的前沿应用。
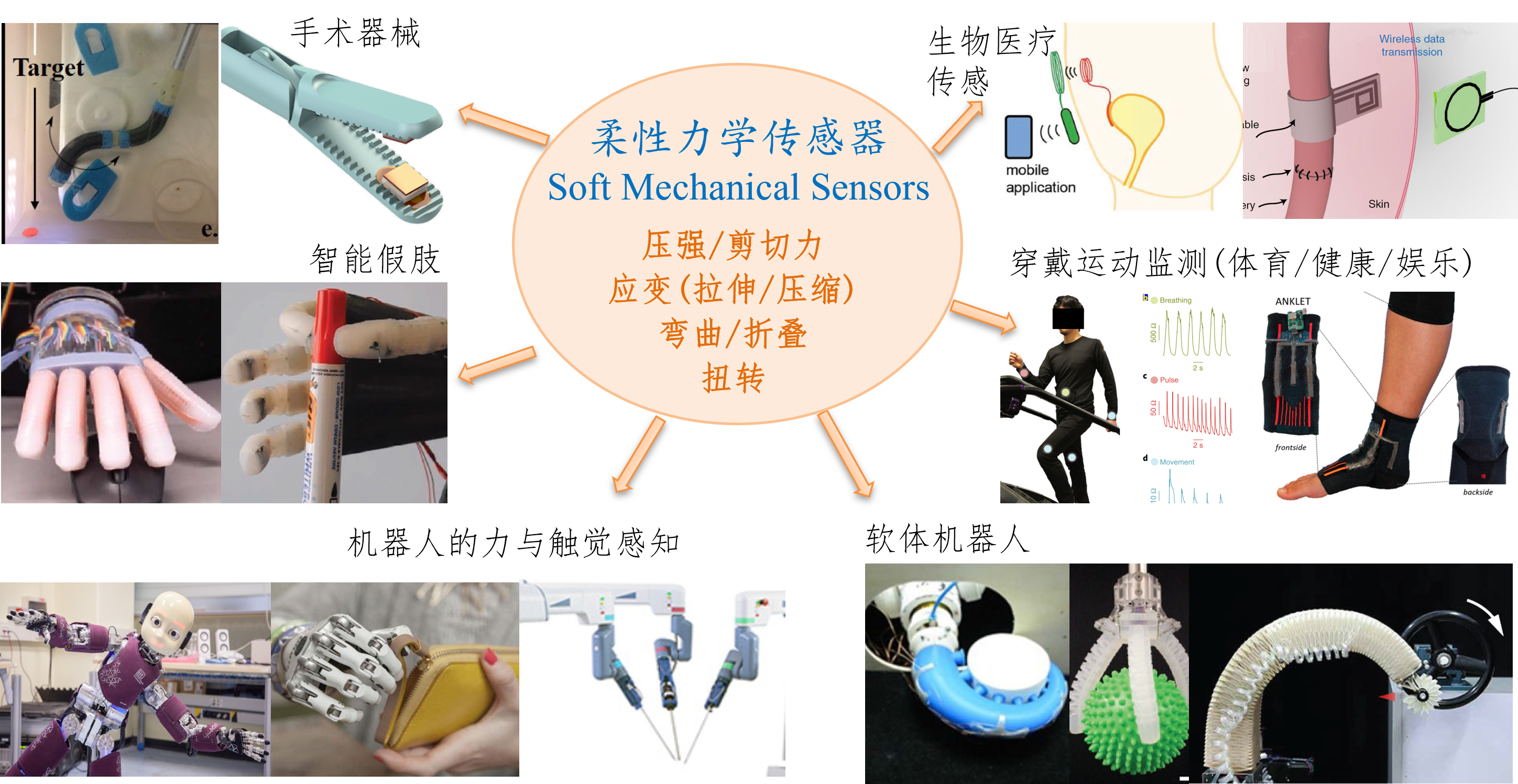
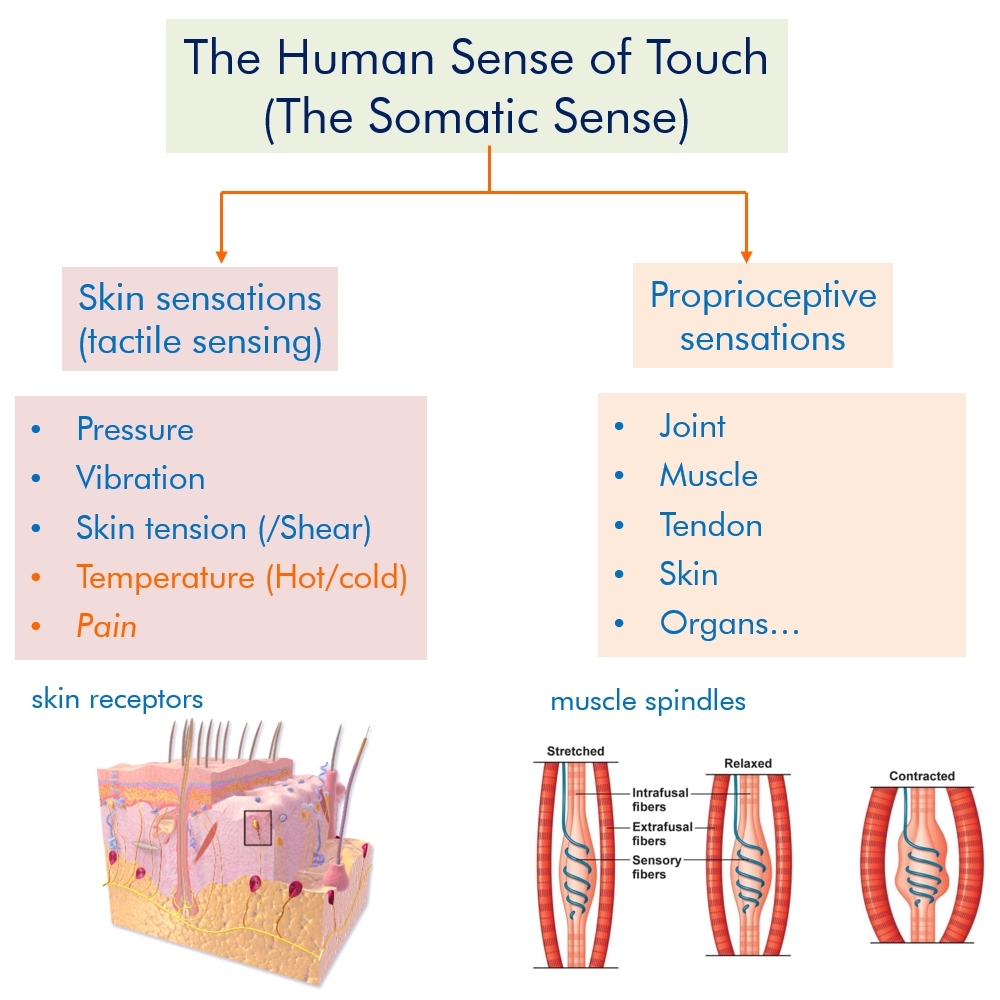
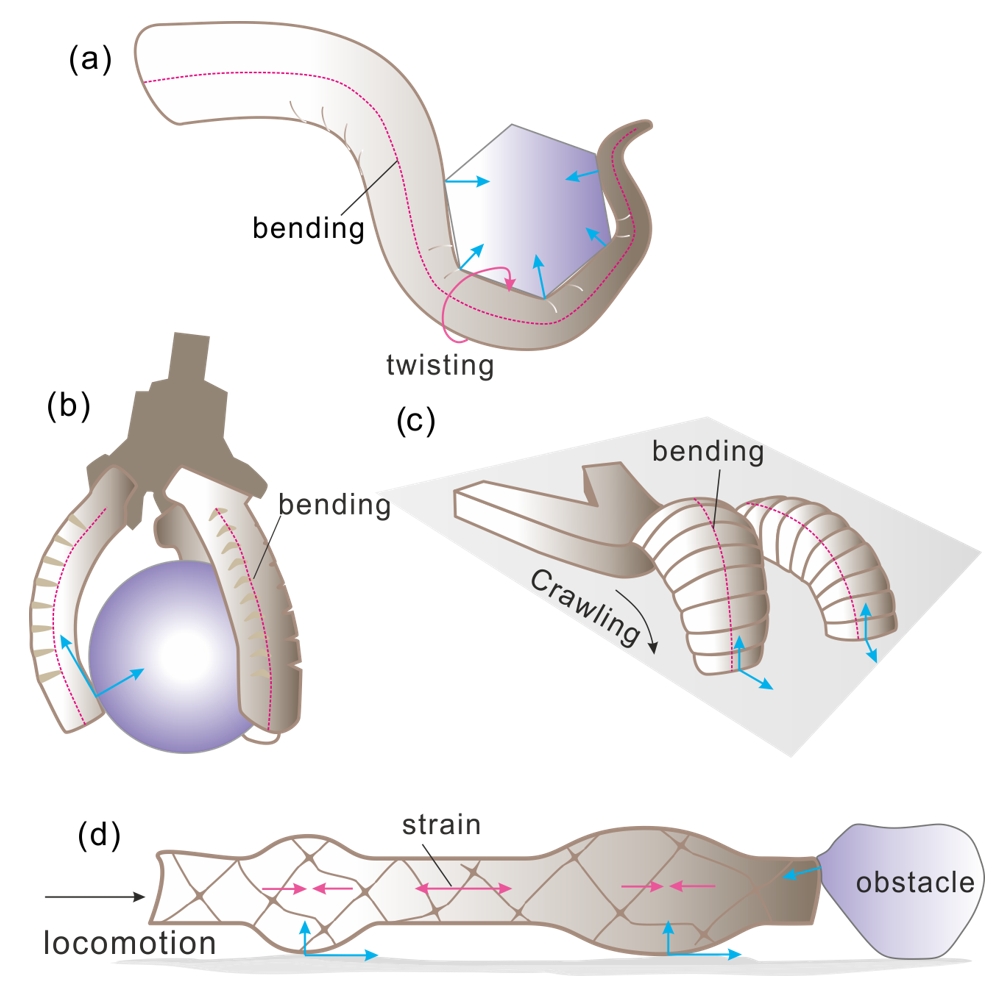
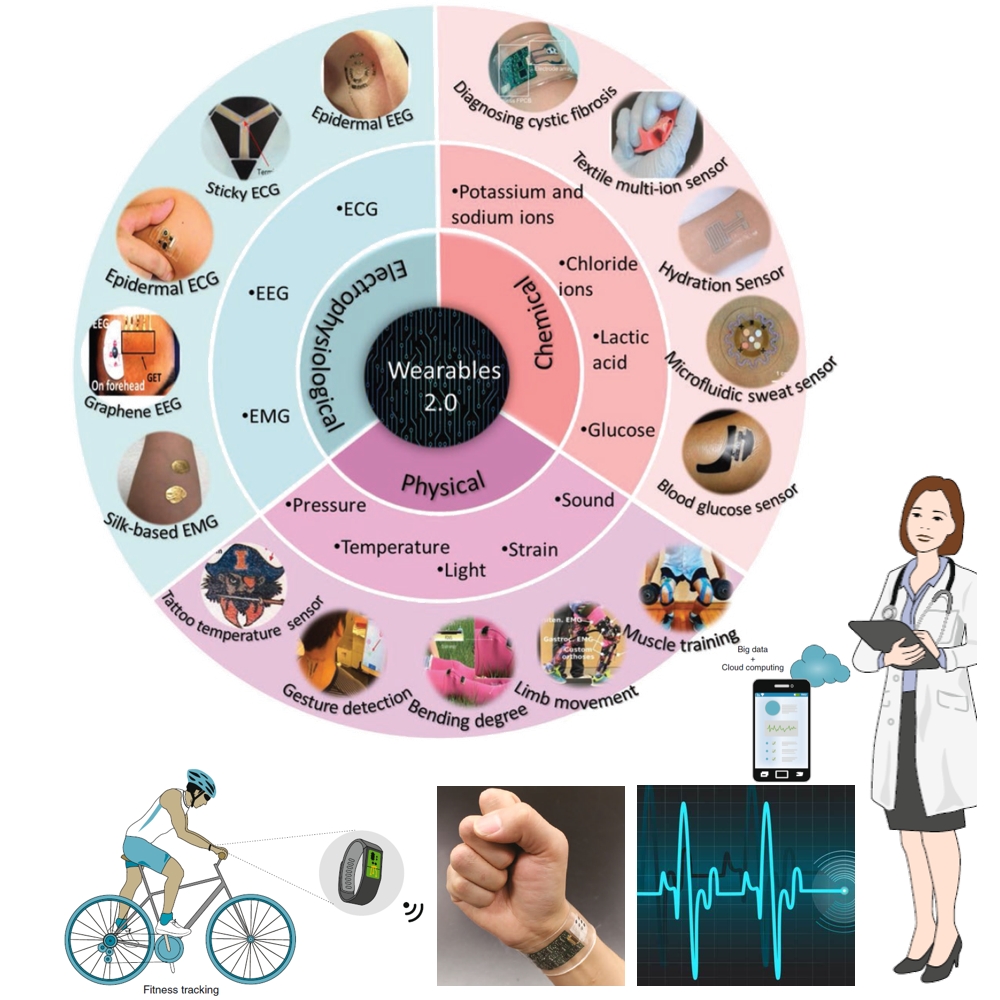
能够测量应力/应变,以及拉伸/压缩、弯曲/折叠、或扭转等物理量的柔性力学传感器 (Soft Mechanical Sensors)是智能软体机器人、可穿戴运动监测、智能假肢、医疗健康和人-机-环境交互系统的核心器件之一。随着新兴功能材料,特别是微纳米复合材料以及先进加工制造技术的快速发展,柔性力学传感器技术与系统的研究在过去10年经历了一个飞速发展的阶段。高灵敏度、可靠性和可重复性、可无缝集成的柔性传感器技器和感知系统,在下一代智能机器人、可穿戴和可植入医疗健康以及人机交互系统中具有广阔的应用前景。
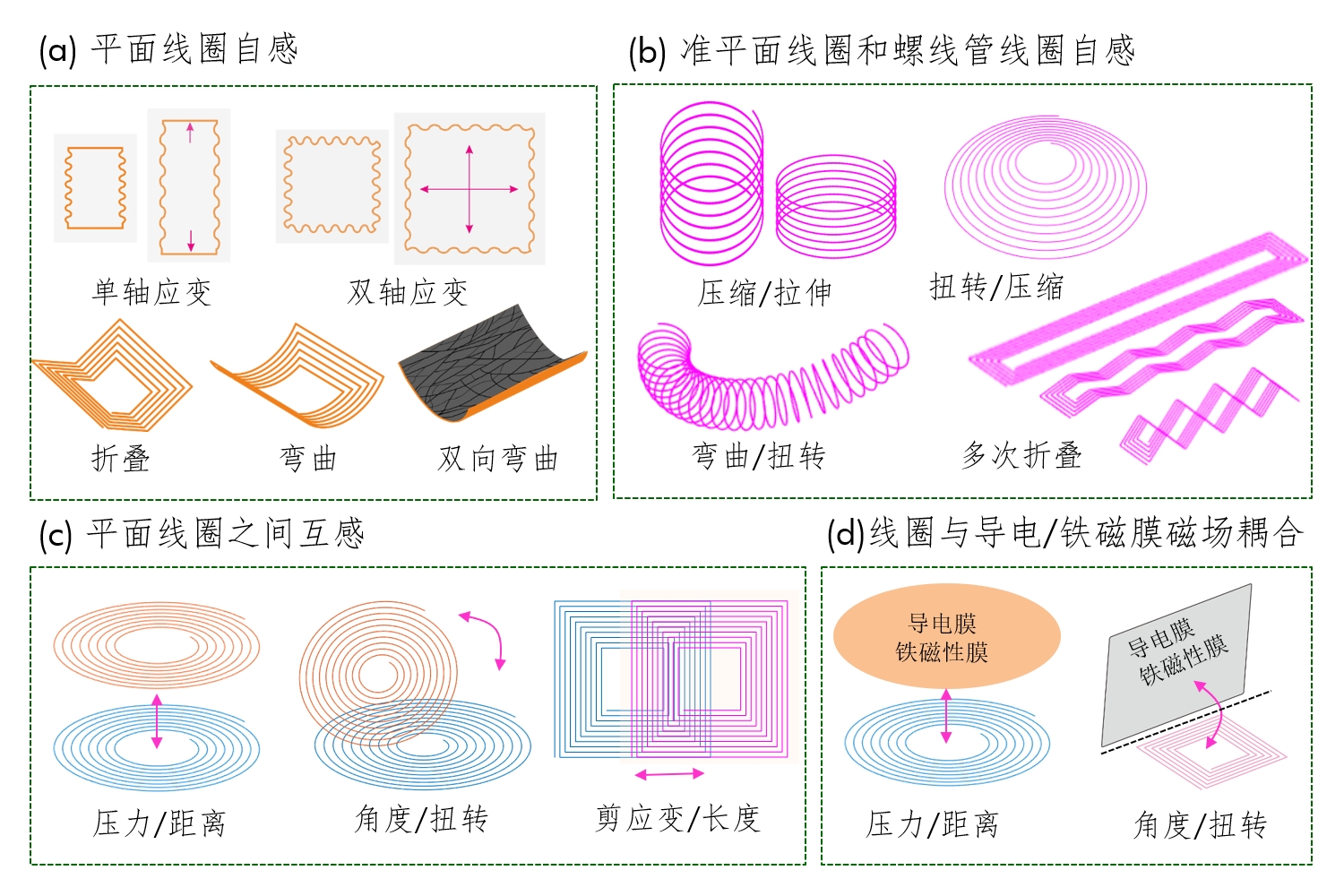
电感式柔性传感
各类电感式传感器和基于电磁场的测量技术早已广泛应用于工业在线监测、无损探测和精密测量系统中,然而绝大多数柔性传感器是基于电阻和电容测量的。近年来,基于结构(马蹄形、螺旋形等)或材料(液态金属)的平面柔性线圈(电感)已经被应用于无线数据通讯和能量传输,但还缺少柔性电感式传感的研究。柔性线圈的电感只与其几何形状有关,对导线和基底材料不敏感,加上电磁耦合效应具有非接触、响应速度快、无迟滞和对弹性体介质性质不敏感等特点,作为柔性力学类传感器具有独特优势。
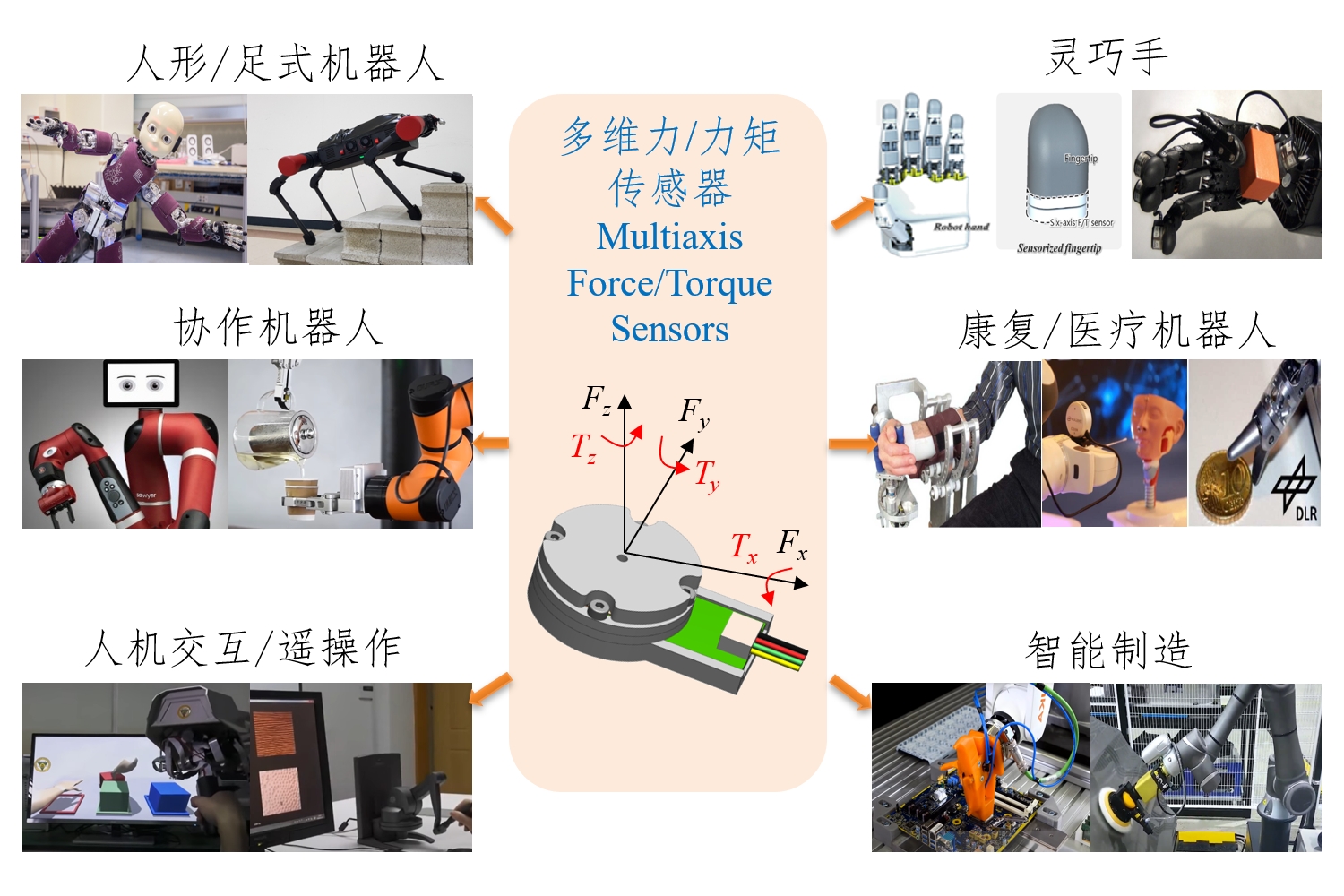
多维力传感器
多维力传感器能够为机械臂、机械手或者末端执行器提供完整的力和力矩信息,具有非常广泛的应用场景。目前,六维力/力矩传感器已经在智能制造、康复和医疗机器人、人形机器人、遥操作系统等领域得到一定的应用。相对于迅速发展的智能机器人技术研究和广阔的应用场景来说,多维力传感器并未大规模应用。价格高、脆弱易损坏、性能和尺寸不兼容可能是主要的制约因素。因此,迫切需要研究低成本、兼顾性能和耐冲击性、可可重构的多维力传感器技术,以满足多场景个性化应用的需求。