We are devoted to develop novel mechanism-based soft sensors that can meet the requirements of low-detection limit, repeatability, and durability for real-world applications in robotics, wearables, healthcare systems and human-machine interactions. And we also investigate sensor related enabling technologies, from sensing electronics, signal processing, multi-sensor fusion, to advanced fabrications and functional materials.

Soft Mechanical Sensors that can measure stress/strain, tension/compression, as well as deformations like bending/folding, or torsion, are crucial for developing the next generation intelligent soft robotics, wearable motion monitoring, smart prosthetics, healthcare, and human-machine-environment interaction systems. Despite the exponential growth and remarkable progress in the last decade, it remains challenging to develop flexible sensors that can meet the requirements of high resolution, repeatable response, robust function, durability, and easy-to-implementation for real-world applications.

Soft Inductive Sensing Mechanisms
Inductive sensors and magnetic field-based sensing technologies have long been widely used in industrial on-line monitoring, non-destructive testing, and precision measurement systems, but the vast majority of flexible sensors are based on resistance and capacitance measurements. In recent years, planar flexible coils (inductors) based on stretchable structures (horseshoe, spirals, etc.) or materials (liquid metal) have been applied to wireless data communication and energy transmission in biomedical applications. To date, it is still lack of research on flexible inductive sensing. The inductance of flexible coils is only determined by its geometry, and is insensitive to the wire and substrate material. Moreover, electromagnetic coupling has the characteristics of non-contact, fast response, no hysteresis and insensitivity to the properties of the elastomer medium, leading to unique features as a flexible mechanical sensor.
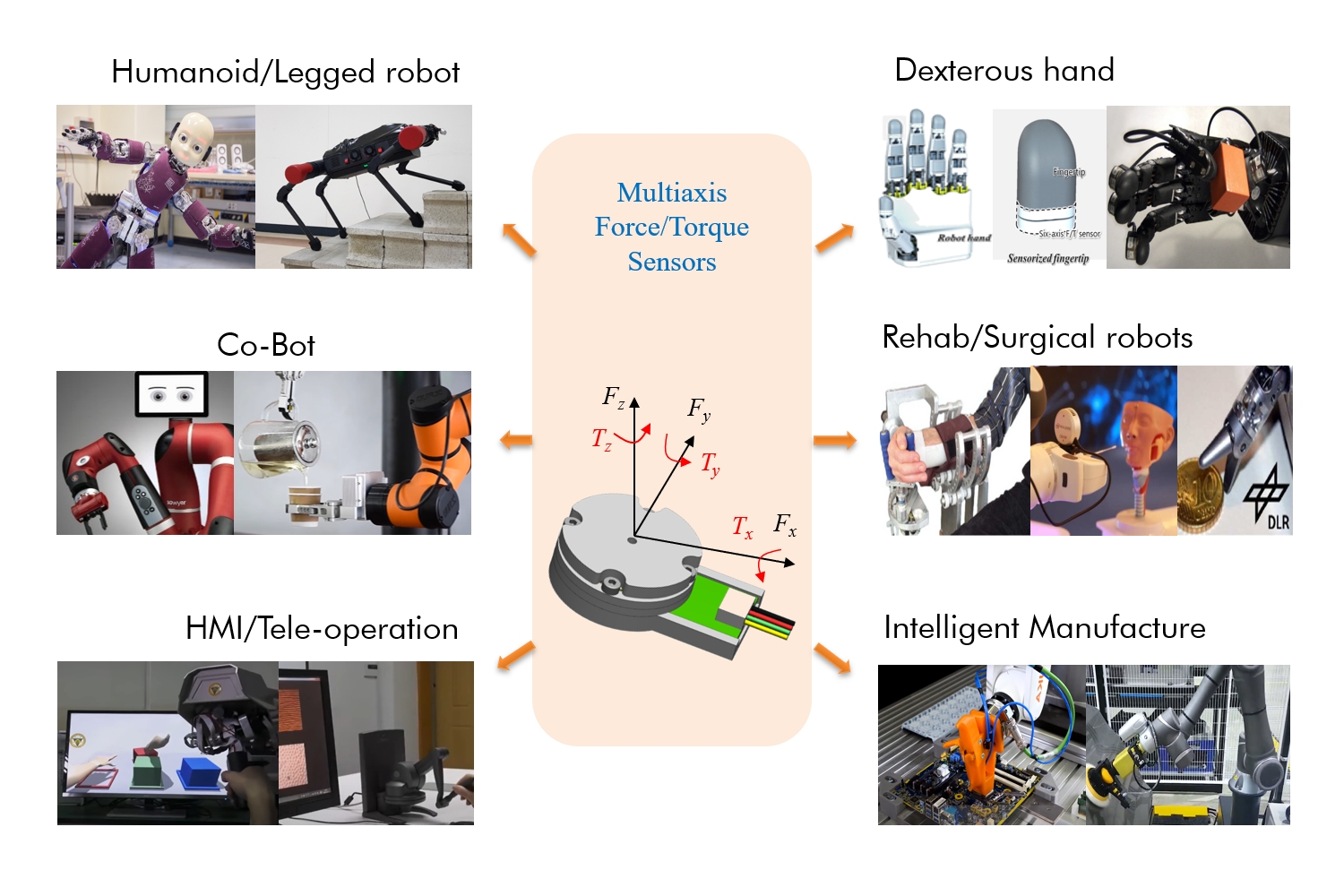
Multiaxis Force Sensors
Multi-axis force sensors (MFSs) have wide applications in robotics and intelligent equipment, providing complete force and torque information for robotic arms, manipulators or end-effectors. To date, six-axis force/torque sensors have been implemented in intelligent manufacturing, rehabilitation and medical robots, humanoid robots, tele-operating systems and other fields. Compared with the rapid development in intelligent robotics technology and broad application scenarios, MFSs have not been utilized at a large scale. High cost, fragility, and incompatible performance and size can be the main constraints. Therefore, there is an urgent need to develop low-cost, performance, impact resistance, overloading tolerant, and reconfigurable MFS technologies to meet the requirements of diverse applications.
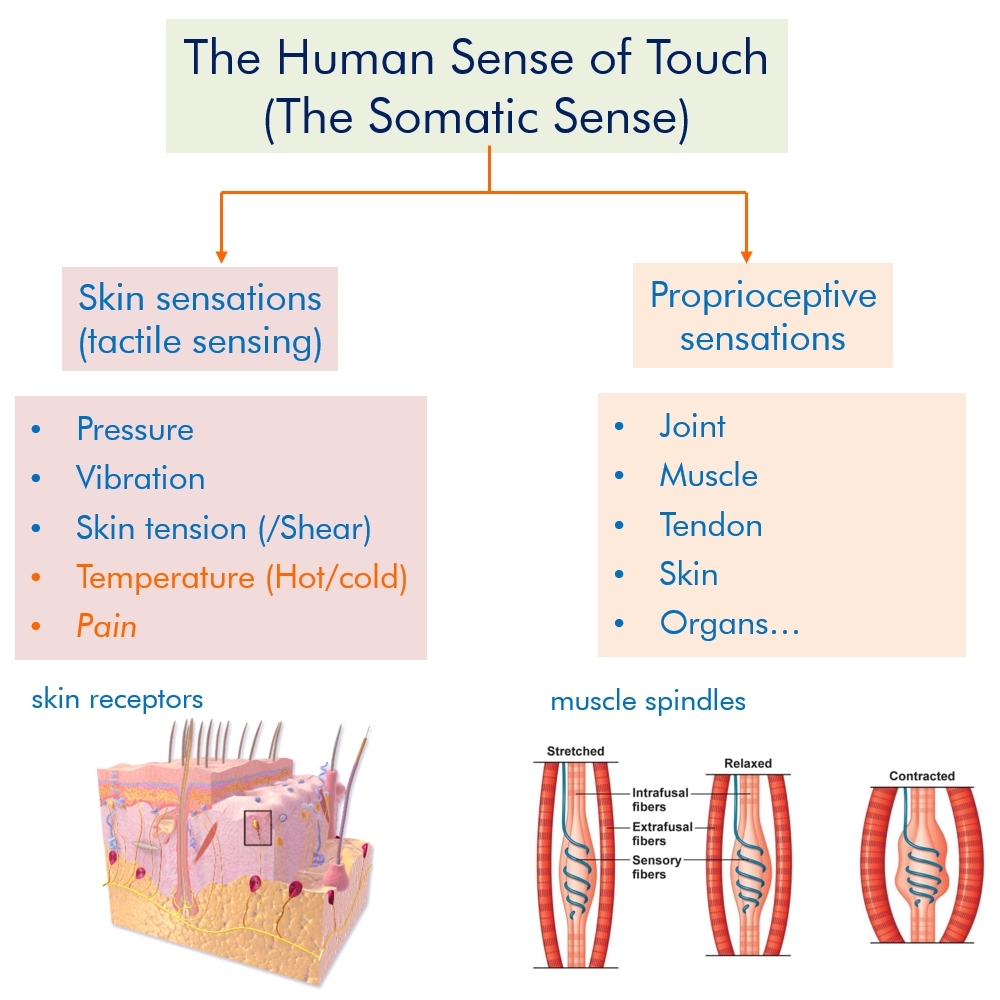
Artificial Sense of Touch
The sense of touch is one of the basic senses for living beings to survive in nature. Our ability to touch is essential for survival and underpins our interaction with the world around us. Compared to machine vision, the development and application of artificial touch perception are much slower.
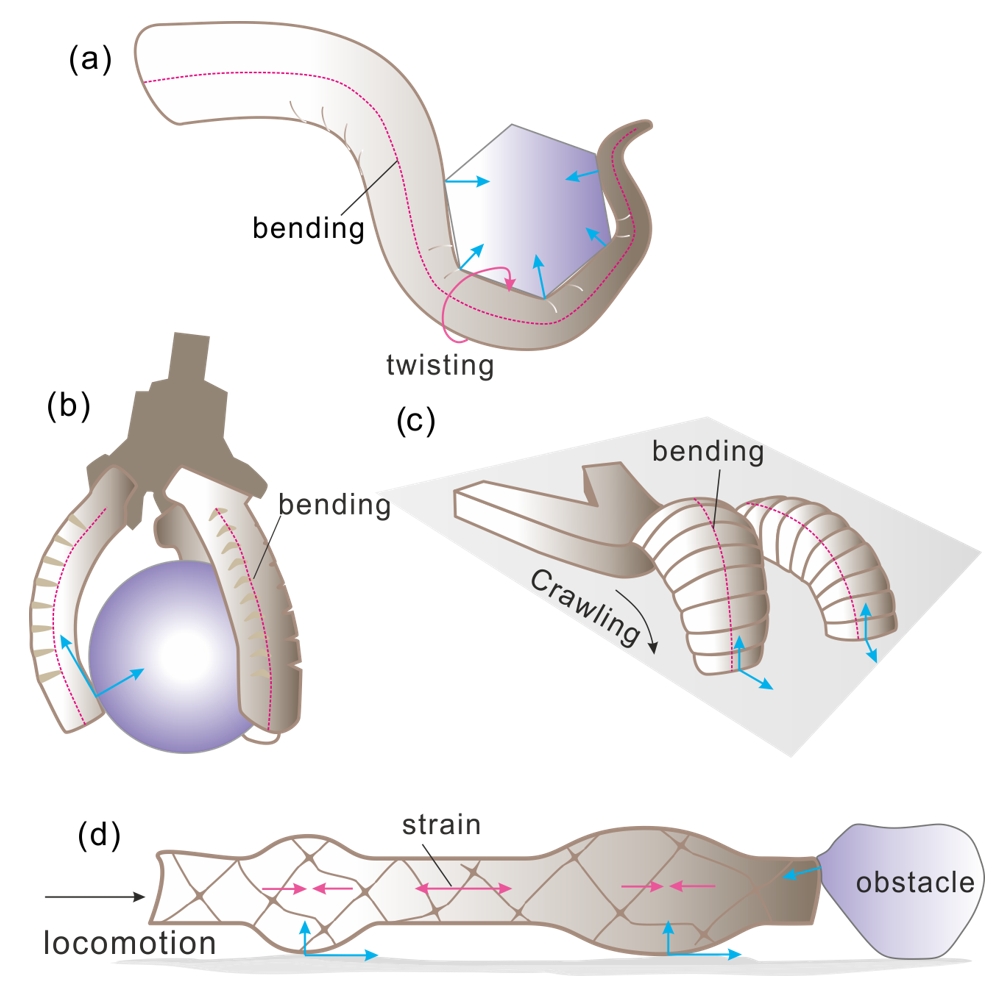
Soft Robotics Perception
The somatosensory system is crucial for living beings to survive and thrive in complex environments and to interact with their surroundings. Similarly, the rapidly developed soft robots need to be aware of their own posture (Proprioception) and detect external stimuli (Tactile sensing), to achieve embodied intelligence and skilled manipulation.
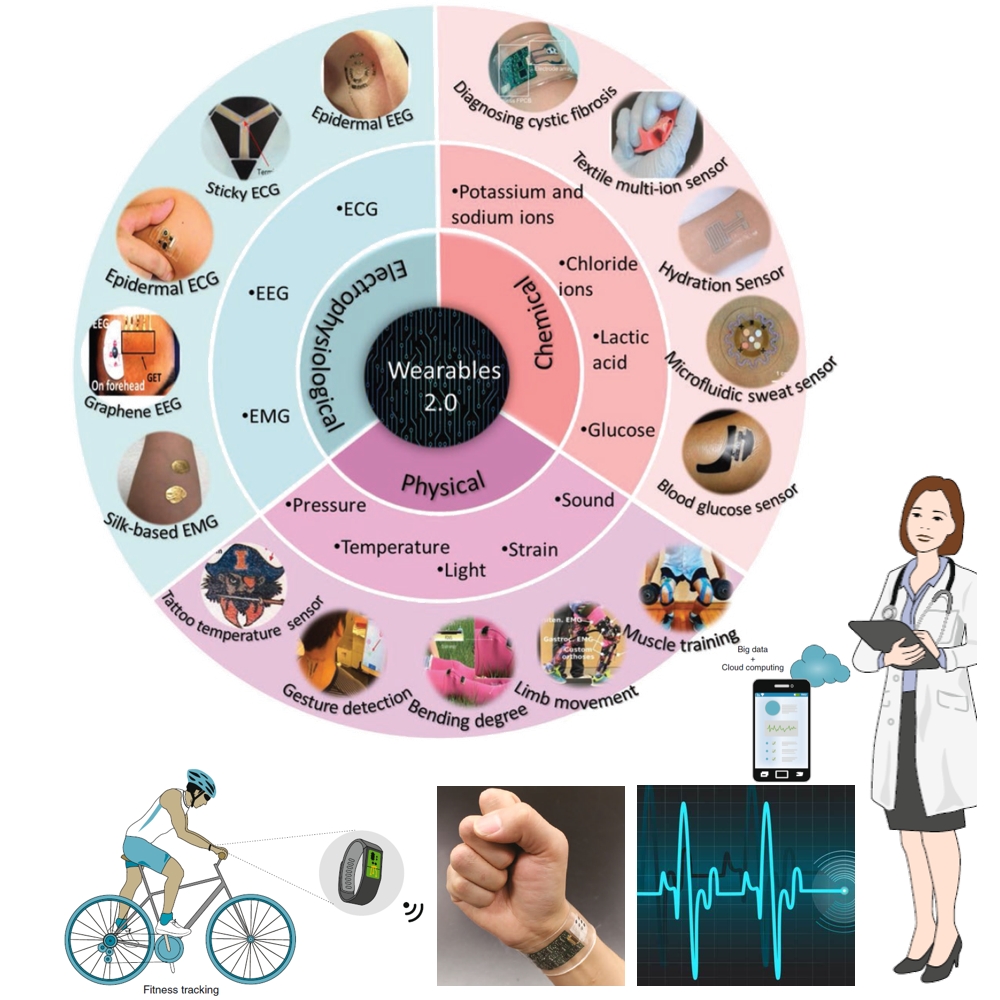
Wearable Sensing for Healthcare
Flexible and stretchable sensors attached on skin or embedded in clothing has paramount impact in personalized healthcare and rehabilitation. Continuous monitored motion and electrophysiological signals can be used for early diagnosis of diseases, rehabilitation quality, health monitoring, intensive care, etc.
USTC
Other Links
Contact Us
Location: Room 425, Academic Building 3,
USTC High-Tech Park, USTC
Address: Fuxing Rd. 100, Hefei,
E-mail: wangh@ustc.edu.cn